YAMATAKE SDC/DMC controller is driver to communicate with device of Yamatake-Honeywell Co. in Japan.
Reference) Help for previous RS, WS command
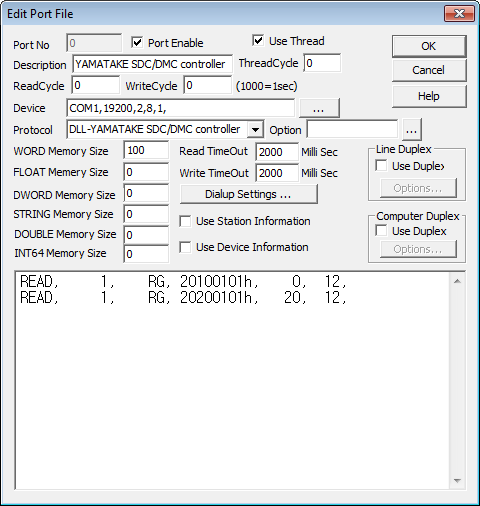
<Figure 1> is read setting example of YAMATAKE SDC/DMC controller communication driver.
|
| <Figure 1> Read setting example of YAMATAKE SDC/DMC controller communication driver |
Device Setting of <Figure 1> are input, Com Port(COM1), Com Baud(19200), Parity Bit(2), Data Bit(8), Stop Bit(1).
YAMATAKE SDC/DMC controller driver read schedule
Read schedule setting parameters are as follows :
1) Station : Equipment number to read. Low byte - CPL equipment number of 1 ~ 127, High byte – CPL sub equipment number(Not used, in current).
2) Data Type : RG : Read the Network/Parameter part,
Except RS : Read Network part(1 ~ 65535 address).
3) Read Start Address : Start address to read.
Read RG : 1h ~ FFFFFFFFh, (32 bit address)
Read except RS : 1h ~ FFFFh,. (16 bit address)
4) Save Start Address for Communication Server : Saving start address of Communication Server.
5) Read Size : read size.
Read schedule example)
READ, 1, RG, 20100101h, 0, 12,
READ, 1, RG, 20200101h, 20, 12,
<Table 1> is data address type and contents of YAMATAKE SDC/DMC controller communication driver.
| Data Address Type | Address | Type ID | Group ID | Contents | Possible to Write | Remarks |
| Network Address | 1h ~ FFFFh | 000h | 000h | Set as ISaGRAPH work editor, possible to read/write when operation mode |
○ | Possible to use all commands such as RG/WGF/WG, RS/WS |
| System parameter/ System monitor data |
00100101h ~ 0010010Dh | 001h | 001h | H/W information | X | Possible to use RG command only |
| 00200101h ~ 00200102h | 002h | Calendar visual setting | ○ | Possible to use RG/WGF/WG command only | ||
| 0C300101h ~ 0C300107h | 0C3h | Calendar visual display | X | Possible to use RG command only | ||
| 0D000101h ~ 0D000107h | 0D0h | System information data | X | |||
| 0D100101h ~ 0D101009h | 0D1h | 001h ~010h | Unit information data | X | ||
| 0D200101h ~ 0D200103h | 0D2h | 001h | CPU unit RS-232C setting | X | ||
| 0D300101h ~ 0D300101h | 0D3h | System movement setting | X | |||
| 0D500101h ~ 0D500101h | 0D5h | Analog cycle setting | X | |||
| 0D600101h ~ 0D600114h | 0D6h | Memory size monitor | X | |||
| Calculation parameter/ Calculation monitor data |
20100101h ~ 201FFF0Ch | 201h | 001h ~ FFFh | PID_A setting | ○ | Possible to use RG/WGF/WG command only |
| 20200101h ~ 202FFF0Ch | 202h | PID_A integer | ○ | |||
| 20300101h ~ 203FFF0Bh | 203h | PID_A monitor | X | Possible to use RG command only | ||
| 21100101h ~ 211FFF0Ch | 211h | PID_CAS setting | ○ | Possible to use RG/WGF/WG command only | ||
| 21200101h ~ 212FFF0Ch | 212h | PID_CAS integer(Master) | ○ | |||
| 21300101h ~ 213FFF0Ch | 213h | PID_CAS integer(Slave) | ○ | |||
| 21400101h ~ 214FFF0Bh | 214h | PID_CAS monitor | X | Possible to use RG command only | ||
| 23400101h ~ 234FFF17h | 234h | Ra_PID setting | ○ | Possible to use RG/WGF/WG command only | ||
| 23500101h ~ 235FFF0Ch | 235h | Ra_PID integer | ○ | |||
| 23600101h ~ 236FFF04h | 236h | Ra_PID monitor | X | Possible to use RG command only | ||
| 24100101h ~ 241FFF0Ah | 241h | UP_PID setting | ○ | Possible to use RG/WGF/WG command only | ||
| 24200101h ~ 242FFF0Bh | 242h | UP_PID integer | ○ | |||
| 24300101h ~ 243FFF0Ch | 243h | UP_PID monitor | X | Possible to use RG command only | ||
| 30100101h ~ 301FFF28h | 301h | TBL/TBR setting | ○ | |||
| Remote data shared parameter | 60000101h ~ 600FFF26h | 600h | PLC link basic setting | X | Possible to use RG command only | |
| 60100101h ~ 601FFF39h | 601h | Discrete device setting | X | |||
| 61000101h ~ 610FFF09h | 610h | Fl-net link setting | X | |||
| 61100101h ~ 6110011Fh | 611h | 001h | Fl-net monitor own node state management information | X | ||
| 61200101h ~ 61200104h | 612h | Fl-net monitor network state management information | X | |||
| 61300101h ~ 61300108h | 613h | Fl-net joining node state monitor | X | |||
| Pattern parameter | C0000101h ~ C0006325h | C00h | 001h ~ 063h | Pattern setting | ○ | Possible to use RG/WGF/WG command only |
| C0100101h ~ C6306334h | C00h ~ C63h | Segment setting | ○ | |||
| CF100101h ~ CF1FFF3Ah | CF1h | 001h ~ FFFh | Pattern FB monitor | X | Possible to use RG command only | |
| User-defined part | 80100101h ~ 9FFFFF3Ah | 801h ~ 9FFh | User-defined memory | ○ | Possible to use RG/WGF/WG command only | |
| <Table 1> Data address type and contents of YAMATAKE SDC/DMC controller communication driver | ||||||
Notice) Integer value which is the read value of YAMATAKE SDC/DMC controller driver is saved at WORD/DWORD memory, and float value according to floating-point system(IEEE754) is saved at FLOAT memory. Refer to each device manual that each part is whether integer or float.
If you click the icon
![]() in protocol
option part, you can see the dialog box such as <Figure 2>. you can also set
read schedule by using this part.
in protocol
option part, you can see the dialog box such as <Figure 2>. you can also set
read schedule by using this part.
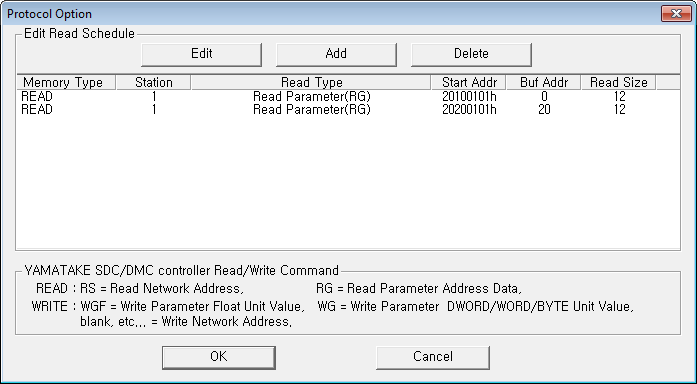 |
| <Figure 2> Example of YAMATAKE SDC/DMC controller communication driver's Option dialog box |
You can set read schedule by using
![]() ,
,
![]() ,
,
![]() button and
listbox of <Figure 2>.
button and
listbox of <Figure 2>.
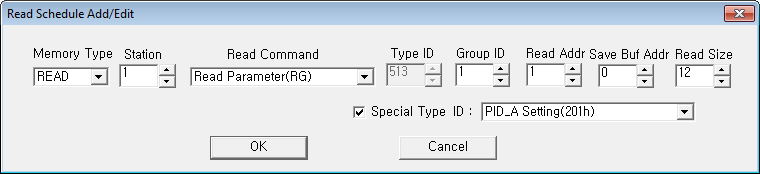 |
| <Figure 3> Example of YAMATAKE SDC/DMC controller communication driver's read schedule Add/Edit dialog box |
When you click Add button or Edit button in dialog box of <Figure 2>, dialog box of <Figure 3> is shown.
You can set the YAMATAKE SDC/DMC controller equipment by using write settings.
Digital Write
Digital write and analog write have the same setting parameters except output value.
Analog Write
Analog write setting parameters are as follows :
1) Port : Connected Port no. (It is not COM no.)
2) Station : Device number to output. Low byte - CPL equipment of no.1 ~ no.127, High byte – CPL sub equipment number(Not used in current).
3) Address : Input memory address to output.
WGF/WG write : Input the address to output among the 1h ~ FFFFFFFFh, as hexadecimal unit.
WS write : Input the address to output among the 1 ~ 65535, as decimal unit.
4) Extra1 : Input the write command.
WGF : Write Network/Parameter part as IEEE754 floating-point type.
WG : Write Network/Parameter part as integer data(Max 32bit, 0 ~ FFFFFFFFh).
Except WS : Write Network part as integer/float type. (Refer to help for previous RS, WS command)
5) Extra2 : Only use, when Extra1 is except WS. (Refer to help previous RS, WS command)
Write example 1)
PORT : 0 STATION : 1 ADDRESS : 20100103 EXTRA1 : WGF EXTRA2 : 0
The setting parameter shown above is example of writing setting.
After writing as analog, you can set the value as IEEE754 floating-point type to above address. (Address 20100103 is PID_A setting value parameter)
Write example 2)
PORT : 0 STATION : 1 ADDRESS : 20100101 EXTRA1 : WG EXTRA2 : 0
The setting parameter shown above is example of writing setting.
After writing as analog, you can set the value as integer type to above address. (Address 20100101 is PID_A setting value parameter)
RS-232C communication and basic power of YAMATAKE SDC/DMC controller device are connected as follows.
Communication cable connection
Connect general RS-232C communication cable to RS232C terminal of YAMATAKE SDC/DMC controller device. (Refer to <Figure 4>)
<Figure 4> is appearance of YAMATAKE SDC/DMC compatibility ACPS device.
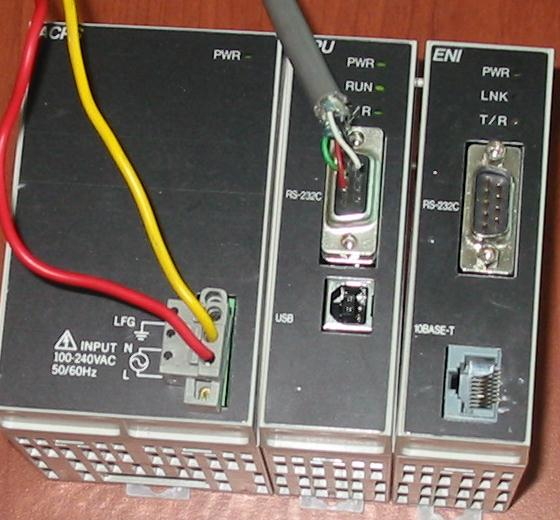 |
| <Figure 4> Appearance of YAMATAKE SDC/DMC compatibility ACPS device |
Basic power connection
Connect 100 ~ 240 V 50/60Hz AC basic power to L, N terminal of YAMATAKE SDC/DMC controller device such as <Figure 4>.