GMPC II communication driver is the driver to communicate with power meter GIMAC/GIMACII/GIMACIII/GIPAM-2200 T model of LSIS Co., Ltd. in Korea.
GIPAM-2200 T model communicate with GMPC controller( GMPC I, GMPC II, GMPC III, GMPC V, ... ) and computer read and write GMPC's data.
Note) Setting of GIPAM-2200 FM model
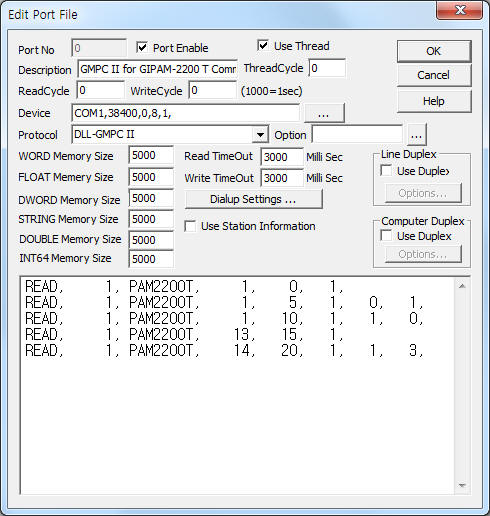
<Figure 1> is read setting example of GMPC II communication driver for GIPAM-2200 T model.
|
|
| <Figure 1> Read setting example of GMPC II communication driver for GIPAM-2200 T model |
Device part of <Figure 1> input Com Port(COM1 or TCP/IP, UDP/IP, etc), Baud Rate(38400), Parity Bit(0), Data Bit(8), Stop Bit(1) respectively according to setting of GMPC.
Baud rate, parity bit, data bit, stop bit can set by using switch of rear or front panel(GMPC controller).
GMPC II communication driver read schedule for GIPAM-2200 T
Read schedule setting parameters are as follows:
1) STATION – GIPAM-2200 T controller station number = 0 ~ 255.
2) Controller Model – Model = PAM2200T (when using GIPAM-2200 T model).
3) Read data type – Data type = 0, 1, 2, 3.... ( Cmd - 10h, refer to reference manual of GIPAM-2200 T )
4) Save Start Address for Communication Server – saveing start address of Communication Server.
5) Read Size – Read size. Fixed according to read data type. ( Refer to <Table 1> ~ <Table 2> )
6) Sub1 command - Input Sub1 command according to controller model.
7) Sub2 command - Input Sub 2 command according to controller model.
Read schedule example)
READ, 1, PAM2200T, 1, 0, 1,
READ, 1, PAM2200T, 1, 5, 1, 0, 1,
READ, 1, PAM2200T, 1, 10, 1, 1, 0,
READ, 1, PAM2200T, 13, 15, 1,
READ, 1, PAM2200T, 14, 20, 1, 1, 3,
<Table 1> is data saving address and contents for each read command.
<Table 2> is each bit value for I/O status read command and <Table 3> is relay status contnets for Relay config 1.
Note) Data type = Cmd number - 10h. Please refer to GIPAM-2200 T reference manual for more information about Cmd, Sub1, Sub2, etc.
| Data type | Sub1 | Sub2 | Contents | Data Saving Address |
| 0 | 00 | 00 | Read of I/O status | Refer to <Table 2> |
| 1 | 00 | 00 | 1st current of transformer | Start Add + 0 ~ 2 : R, S, T phase current |
| 00 | 01 | 2nd current of transformer | ||
| 01 | 00 | Difference current | ||
| 02 | 00 | Suppression current | ||
| 6 | 00 | 00 | zero-phase sequence voltage and current | Start Add + 0 ~ 2 : zero-phase sequence voltage, current 1, current 2 |
| 02 | 00 | I0 difference current, suppression current | Start Add + 0 ~ 1 : I0 difference current, suppression current |
|
| 8 | 09 | 00 | Number of CB ON and CB Run Time | Start Add + 0 ~ 1 : number of CB ON, CB Run Time |
| 10(0Ah) | 00 | Number of Out01 ~Out06 ON | Start Add + 0 ~ 5 : Number of Out01 ~Out06 ON |
|
| 11(0Bh) | 00 | Number of Out07 ~Out08 ON | Start Add + 0 ~ 1 : number of Out07 ~Out08 ON |
|
| 11(0Bh) | 00 | 01 | Vo, Io max record value, operation time | Start Add + 0 ~ 2 : Vo Max, Io Max, operation time |
| 00 | 02 | Io2 max | Start Add + 0 : Io2 max |
|
| 02 | 00 | Analog Input #1 | Start Add + 0 ~ 2 : current value of AI 1 ~ 3 |
|
| 03 | 00 | Analog Input #2 | Start Add + 0 : current value of AI 4 |
|
| 06 | 00 | DO op mode, TCS, TRS, CC setting | Start Add + 0 : DO op mode ( 0 = latch, 1 = pulse ) Start Add + 1 : TCS use ( 0 = unuse, 1 = use ) Start Add + 2 : TRS use (0 = unuse, 1 = use ) Start Add + 3 : TRS Period Start Add + 4 : Control Contact Status(bit 0 ~ 3 : CC1 ~ 4 close(1)/open(0)) |
|
| 07 | 00 | 2 harmonic Max | Start Add + 0 : 2 harmonic Max Start Add + 1 : Reserved |
|
| 13(0Dh) | 00 | 00 | Relay config 1 | Start Add + 0 : Reserved Start Add + 1 : Relay status (refer to <Table 3>) Start Add + 2 : Reserved (frequency, 60Hz) Start Add + 3 : Reserved (windings method) Start Add + 4 : DFRP TR winding angle Start Add + 5 : DFRP grounding (AAAAh = 1st, 5555h = 2nd, etc = don't use) |
| 00 | 01 | Relay config 2 (TR rated voltage) | Start Add + 0 ~ 1 : TR 1st, 2nd rated voltage |
|
| 00 | 02 | Relay config 3 (1st windings CT) | Start Add + 0 ~ 1 : 1st windings CT 1st, 2nd current |
|
| 00 | 03 | Relay config 4 (2nd windings CT) | Start Add + 0 ~ 1 : 2nd windings CT 1st, 2nd current |
|
| 00 | 04 | Relay config 5 (NCT 1st CT) | Start Add + 0 ~ 1 : NCT 1st CT ratio Primary, Secondary |
|
| 00 | 05 | Relay config 6 (NCT 2nd CT) | Start Add + 0 ~ 1 : NCT 2nd CT ratio Primary, Secondary |
|
| 00 | 06 | Relay config 7 (GPT PT) | Start Add + 0 ~ 1 : Reserved (GPT 1st PT ratio) Start Add + 2 : GPT 3rd PT ratio |
|
| 00 | 07 | Relay config 8 (GCT) | Start Add + 0 ~ 1: GCT 1st, 2nd current |
|
| 17(11h) | 00 | CBF setting | Start Add + 0 : CB Failure use Start Add + 1 : CB fail to open time setting(FFFFh =don't use) Start Add + 2 : CB fail to close time setting(FFFFh =don't use) Start Add + 3 ~ 5 : Reserved |
|
| 14(0Eh) | 01 | 00 | 50/51(OCRw1) setting 1 | Start Add + 0 : Curve setting ( 0, 1, 2, 3, 4, 5 = Off, DT, SI, VI, EI, LI ) Start Add + 1 : OCRw1 instantaneous Low pick-up current (x 100, FFFFh =don't use) Start Add + 2 : OCRw1 instantaneous Low operating time ( x 100 ) Start Add + 3 : OCRw1 instantaneous High pick-up current (x 100, FFFFh =don't use) Start Add + 4 : OCRw1 time delay pick-up current ( x 100 ) Start Add + 5 : OCRw1 inverse time delay Time Lever or time delay operating time ( x 100 ) |
| 01 | 01 | 50/51(OCRw1) setting 2 | Start Add + 0 : OCRw1 inverse time delay additional delay time ( x 100 ) |
|
| 01 | 02 | 50/51(OCRw2) setting 1 | Equal with 50/51(OCRw1) setting 1 |
|
| 01 | 03 | 50/51(OCRw2) setting 2 | Equal with 50/51(OCRw1) setting 2 |
|
| 02 | 00 | 50/51N(OCGRw1) setting 1 | Equal with 50/51(OCRw1) setting 1 |
|
| 02 | 01 | 50/51N(OCGRw1) setting 2 | Equal with 50/51(OCRw1) setting 2 |
|
| 02 | 02 | 50/51N(OCGRw2) setting 1 | Equal with 50/51(OCRw1) setting 1 |
|
| 02 | 03 | 50/51N(OCGRw2) setting 2 | Equal with 50/51(OCRw1) setting 2 |
|
| 07 | 00 | Ground and voltage relay 64 setting 1 | Start Add + 0 : selection of OVGR characteristic curve (0, 1, 2 = Off, DT, SI) Start Add + 1 : OVGR instantaneous pick-up zero-phase sequence voltage (x 100, FFFFh =don't use) Start Add + 2 : OVGR instantaneous operating time ( x 1 ) Start Add + 3 : OVGR time delay pick-up zero-phase sequence voltage (x 100, FFFFh =don't use) Start Add + 4 : OVGR inverse time delay Time Lever or time delay operating time ( x 100 ) |
|
| 10(0Ah) | 00 | 67G,67N setting | Start Add + 0 : SGR/DGR pick-up zero-phase sequence current (x 100) Start Add + 1 : SGR/DGR pick-up zero-phase sequence voltage (x 100) Start Add + 2 : SGR/DGR basis sensitivity phase angle ( x 1 ) Start Add + 3 : SGR/DGR time delay operating time(x 100) |
|
| 14(0Eh) | 00 | 87T(DFRP) setting 1 | Start Add + 0 : DFRP High pick-up current (x 100, FFFFh =don't use) Start Add + 1 : DFRP Low pick-up current (x 100, FFFFh =don't use) Start Add + 2 : DFRP Low time delay operating time (x 1, 3 = instantaneous) Start Add + 3 : DFRP Low slope1 (x 100) Start Add + 4 : DFRP Low slope2 (x 100) Start Add + 5 : DFRP Low point of centraflexure (x 100) |
|
| 14(0Eh) | 01 | 87T(DFRP) setting 2 | Start Add + 0 : DFRP Low 2 harmonic setting (x 100, FFFFh =don't use) Start Add + 1 : use or don't use of Io elimination (1 = use, 0 = don't use) |
|
| 15(0Fh) | 00 | 87T(DFRP) setting 3 | Start Add + 0 : DFRG Low pick-up current (x 100) Start Add + 1 : DFRG Low time delay operating time (x 1, 3 = instantaneous) Start Add + 2 : DFRG Low slope1 (x 100) |
|
| <Table 1> Data saving address and contents for each read command | ||||
| Data Saving Address | Bit position | |||||||
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| Start Add + 0 | Event | - | - | T/L | Pick-up | Sync | DiagErr | P/F |
| Start Add + 1 | - | R/L | DI06 | DI05 | DI04 | DI03 | DI02 | DI01 |
| Start Add + 2 | - | - | - | - | DO10 | DO09 | DO08 | DO07 |
| Start Add + 3 | DO06 | DO05 | DO04 | DO03 | DO02 | DO01 | CBClose | CB Open |
| Start Add + 4 | Device ID | |||||||
| Start Add + 5 | - | - | - | - | - | 27-T | 27P-S | 27P-R |
| Start Add + 6 | 164INST | 164TD | 167G | 167N | 150NH | 150NL | 151N | 150PH-T |
| Start Add + 7 | 150PH-S | 150PH-R | 150PL-T | 150PL-S | 150PL-R | 151P-T | 151P-S | 151P-R |
| Start Add + 8 | - | - | - | - | - | - | - | - |
| Start Add + 9 | 264INST | 264TD | 267G | 267N | 250NH | 250NL | 251N | 87G/50 |
| Start Add + 10 | 87G/51 | 87/50-T | 87/50-S | 87/50-R | 87/51-T | 87/51-S | 87/51-R | 250PH-T |
| Start Add + 11 | 250PH-S | 250PH-R | 250PL-T | 250PL-S | 250PL-R | 251P-T | 251P-S | 251P-R |
| <Table 2> Each bit value for I/O status read command | ||||||||
| Bit position | Contents | Remarks |
| 15 ~ 12 | - |
|
| 11 | 1st side OSD_SEL | 0 = not use 1 = OCGR 2 = SGR 3 = DGR |
| 10 | ||
| 9 | 1st side OSD_SEL | |
| 8 | ||
| 7 | OVGR_T | 0 = don't use, 1 = primary side 2 = secondary side |
| 6 | ||
| 5 | OCR_W2 |
|
| 4 | OCR_W1 |
|
| 3 | DFRG |
|
| 2 |
|
|
| 1 | DFRP |
|
| 0 |
|
|
| <Table 3> Relay status contnets for Relay config 1 | ||
GMPC II communication driver store the same data in WORD, DWORD, FLOAT memory, but the data format are different.
If you click the icon ![]() in protocol option part, you
can see the dialogue box such as <Figure 2>. you can also set read schedule by
using this part.
in protocol option part, you
can see the dialogue box such as <Figure 2>. you can also set read schedule by
using this part.
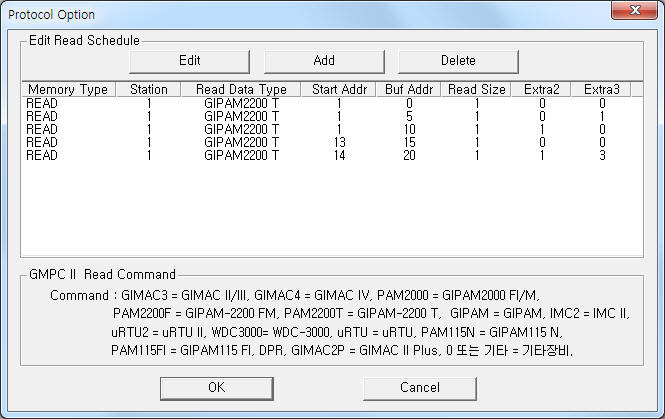 |
| <Figure 2> Example of GMPC II communication driver’s Option dialogue box |
You can set read schedule by using ![]() ,
, ![]() ,
, ![]() button and listbox of <Figure
2>.
button and listbox of <Figure
2>.
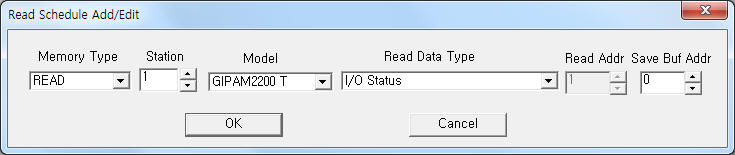 |
| <Figure 3> Example of GMPC II communication driver’s read schedule Add/Edit dialogue box |
When you click Add button or Edit button in dialogue box of <Figure 2>, dialogue box of <Figure 3> is shown.
You can write GIPAM-2200 T equipment's setting value by using write settings.
Note) Write for GIPAM-2200 T can control when the equipment's setting is 'remote'.
Digital Write
Digital write setting parameters are as follows:
1) PORT Port no. (0 ~ 255)
2) STATION GIPAM-2200 T controller station number = 0 ~ 255.
3) ADDRESS Control command number(hex-decimal unit), refer to <Table 4>.
4) Extra1 Model name = PAM2200T. ( GIPAM-2200 T model )
5) Extra2 Selection of Control or Reset command.
0 – Control command,
1 – Reset command.
Extra 2 |
Address(Sub2) |
Command contents |
Control command |
01h |
CB ON |
02h |
CB OFF |
|
25h |
Control Contact 1 ON |
|
26h |
Control Contact 2 ON |
|
27h |
Control Contact 3 ON |
|
28h |
Control Contact 4 ON |
|
2Dh |
Control Contact 1 OFF |
|
2Eh |
Control Contact 2 OFF |
|
2Fh |
Control Contact 3 OFF |
|
30h |
Control Contact 4 OFF |
|
Reset command |
00h |
CB Run Time Reset |
0Dh |
Operating time reset |
|
0Eh |
Fault reset |
|
10h |
CB# ON count reset |
|
12h |
OUT#01 ON count reset |
|
13h |
OUT#02 ON count reset |
|
14h |
OUT#03 ON count reset |
|
15h |
OUT#04 ON count reset |
|
16h |
OUT#05 ON count reset |
|
17h |
OUT#06 ON count reset |
|
18h |
OUT#07 ON count reset |
|
19h |
OUT#08 ON count reset |
|
1Ch |
Io1 max reset |
|
1Dh |
Vo max reset |
|
1Eh |
Event record reset |
|
1Fh |
All fault record reset |
|
20h |
All record reset |
|
23h |
Io2 max reset |
|
| <Table 4> Setting element and command contents for digital write | ||
Write example 1)
PORT : 0 Station : 1, ADDRESS : 0001, EXTRA1 : PAM2200T, EXTRA2 : 0
The setting parameter shown above is CB ON control example for 1 controller station GIPAM-2200 T.
CB ON write command can control when the controller's setting is 'remote'
Write example 2)
PORT : 0 Station : 1, ADDRESS : 0002, EXTRA1 : PAM2200T, EXTRA2 : 0
The setting parameter shown above is CB OFF control example for 1 controller station GIPAM-2200 T.
CB OFF write command can control when the controller's setting is 'remote'
Write example 3)
PORT : 0 Station : 1, ADDRESS : 0025, EXTRA1 : PAM2200T, EXTRA2 : 0
The setting parameter shown above is Control Contact 1 ON write example for 1 controller station GIPAM-2200 T.
Control Contact 1 ON write command can control when the controller's setting is 'remote'
Write example 4)
PORT : 0 Station : 1, ADDRESS : 002D, EXTRA1 : PAM2200T, EXTRA2 : 0
The setting parameter shown above is Control Contact 1 OFF write example for 1 controller station GIPAM-2200 T.
Control Contact 1 OFF write command can control when the controller's setting is 'remote'
Write example 5)
PORT : 0 Station : 1, ADDRESS : 0000, EXTRA1 : PAM2200T, EXTRA2 : 1
The setting parameter shown above is CB Run Time reset example for 1 controller station GIPAM-2200 T.
CB Run Time reset write command can control when the controller's setting is 'remote'
Write example 5)
PORT : 0 Station : 1, ADDRESS : 0023, EXTRA1 : PAM2200T, EXTRA2 : 1
The setting parameter shown above is Io2 max reset example for 1 controller station GIPAM-2200 T.
Io2 max reset write command can control when the controller's setting is 'remote'
Analog Write
GMPC II communication driver for GIPAM-2200 T model don't support analog write.
Connection of main power and communication cable are as follows.
Connection of main power
Please connect 120 V AC main power to 24, 25 connector at GIPAM-2200 T controller's rear panel.
Note) GIPAM-2200 T Password input method : you can input 'password' by using 'UP' and 'Down' button of frong panel. ( Inital(default) Password : 0000 )
Connection of I-NET communication cable
Please connect I-NET RS-485 communication cable to 94 or 99 ( Rx0 ), 95 or 100 ( Rx1 ), 92 or 97 ( Tx0 ), 93 or 98 ( Tx1 ) connector such as <Figure 4>.
Note) When you connect GIPAM-2200 T and GMPC, you have to connect Rx = Tx, Tx = Rx respectively. ( I-NET cable = offered by LSIS Co., Ltd. when you buying GMPC or GIPAM-2200 T)
Connection of GMPC V almost equal with GMPC III. So you can refer to connection of GMPC III part.
<Figure 4> is apperance of GMPC V controller.
 |
| <Figure 4> Apperance of GMPCV controller |
Note) Password input method : you can input 'password' by using 4 button of frong panel. ( Inital(default) Password : press 'FUNCTION', 'SELECT', 'UP', 'ENTER' button 2 times by turns )
Setting of GMPC V)
1. Time & Date : Date and Time setting of GMPC V.
2. Model : Model, protocol and communication method of GMPC V.
Model | Protocol : select GMP(I-NET protocol of GMPC) or MODBUS protocol,
Model | Media : select communication media of GMPC V.
Model | Main Port : select Primary(P) or Secondary(S).
3. Serial : select Com1 or Com2 port of GMPC V.
4. Network(This) : select LAN1, LAN2 Ethernet port.
Network(This) | Ethernet Port : select primary ethernet port of GMPC V.
Network(This) | IP_0 : input IP Address of Primary Ethernet,
Network(This) | Port_0 No_0 : input Port number of Primary Ethernet,
Network(This) | Netmask_0 : input Subnet mask of Primary Ethernet,
Network(This) | Gateway_0 : input Gateway IP Address of Primary Ethernet,
Network(This) | Host_IP0 : input Host(PC, etc) IP Address of Primary Ethernet.
After setting GMPC V controller, save the setting by using 'ENTER' button.
Also, you have to reset(power off and power on) in order to apply the setting value. (don't reset, GMPC V use the old setting value)
Note) When you using the 'Ethernet' communication, you have to set Host(PC, etc) IP address at GMPC V controller.
Also if you don't use gateway at network, please set 'Gateway' IP address to '0.0.0.0'.
Note) You must input power for the first time of GIMAC-IV, etc, and input power GMPC V.
If you input power GMPC V the first and input GIMAC-IV, etc, GMPC V can't find connected equipment. So it may not be able to communicate with connected equipment.