DASA MOTION Controller 는 국내의 다사테크 의 모션 콘트롤러 지원을 위한 통신 프로토콜이다.
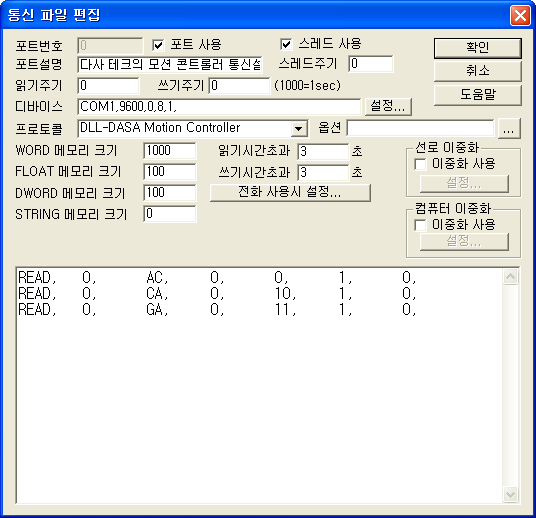
다음 <그림 1>은 DASA MOTION Controller 프로토콜을 사용한 경우의 통신파일을 작성 예이다.
<그림 1> DASA MOTION Controller 프로토콜의 통신설정 예
<그림 1>의 DEVICE 부분은 연결된 통신포트(COM1), 통신속도(9600), Parity Bit (0), Data Bit(8), Stop Bit(1), 순으로 입력한다.
DASA MOTION Controller 프로토콜의 읽기형식
1) 스테이션: 사용안함.
2) 읽을 종류: 명령어. ( <표1>를 참조 )
AA : Robot 상태 읽기,
AB : Error 상태 읽기,
AC : Position 읽기,
CA : Velocity 읽기,
ED : 수행중인 라인 읽기,
EF : 수행중인 혹은 설정된 파일 읽기,
FC : 제어기에 파일존재 여부 확인,
GA : 입력카드 읽기,
GB : 출력카드 읽기,
GD : 장착된 카드 개수 읽기,
GE : PLC 입력 읽기 등.
3) 읽을 주소 : 읽을 종류에 따라 내용이 달라짐. ( <표 1> 참조 )
4) 메모리 저장 위치 : 읽어온 상태 값을 저장할 버퍼위치.
5) 읽는 크기: 한번에 읽어올 항목 수. (읽을 종류별로 고정)
6) Extra1 : 명령내용을 읽을 파일명 번호 지정. FC 명령에만 사용. ( 파일명 : cmd_%04.txt )
읽기 예
READ |
스테이션 |
읽을종류 |
읽을 주소 |
메모리저장위치 |
읽는 개수 |
Extra1 |
READ, |
0, |
AC, |
0, |
0, |
1, |
0, |
READ, |
0, |
CA, |
0, |
10, |
1, |
0, |
READ, |
0, |
GA, |
0, |
11, |
1, |
0, |
종 류 |
내 용 |
읽을 주소 |
Extra1 |
AA |
Robot 상태 읽기 |
사용안함 |
사용안함 |
AB |
Error 상태 읽기 |
|
|
AC |
Position 읽기 |
종류 – 0 : Encoder, 1 : Joint, 2 : XYZ |
|
CA |
Velocity 읽기 |
사용안함 |
|
ED |
수행중인 라인 읽기 |
|
|
EF |
수행중인 혹은 설정된 파일 읽기 |
|
|
FC |
제어기에 파일존재 여부 확인 |
DISK ID – 0 : Backup RAM, 1 : EEPROM, 2 : FDD |
파일이름 읽기 파일명 지정 : cmd_%04.txt 에서 %04 값 (0 ~ 9999) |
GA |
입력카드 읽기 |
입력카드 번호 (0 ~ 99) |
|
GB |
출력카드 읽기 |
출력카드 번호 (0 ~ 99) |
|
GD |
장착된 카드 개수 읽기 |
사용안함 |
|
GE |
PLC 입력 읽기 |
입력카드 번호 (0 ~ 99) |
|
<표 1> DASA MOTION Controller 프로토콜의 읽기 종류에 따른 읽을 주소, Extra1 의 내용
종 류 |
저장위치 |
저장내용 |
AA |
저장위치 + 0 저장위치 + 1 |
Data 0 - 3Bit : Error, 2 Bit : Motor Power, 1 Bit : In Position, 0 Bit : Run, Data 1 - 1 Bit : Servo, 0 Bit : Origin Complete, |
AB |
저장위치 + 0 ~ n |
에러문자 표시 |
AC |
저장위치 + 0 ~ n |
Encoder : 10 byte data (0 ~ 999999999) 가 축 수 만큼. Joint : 10 byte float data 가 축 수 만큼. XYZ : X, Y, Z, A, B, C에 대한 10 byte float data 와 POSE 데이터. POSE- 2 Bit : right(1)/left(0), 1 Bit : above(1)/below(0), 0 Bit : upper(1)/down(0), |
CA |
저장위치 + 0 |
속도 : 0 ~ 100 |
ED |
저장위치 + 0 |
수행중인 라인 : 0 ~ 999 또는 –1 |
EF |
저장위치 + 0 ~ n |
수행중인 파일이름 숫자 표시 (A : 65) |
FC |
저장위치 + 0 |
1 : 파일 존재, 0 : 파일 없음 |
GA |
저장위치 + 0 저장위치 + 1 저장위치 + 2 ... |
접점 카드 수 3 ~ 0 Bit : 접점 1 ~ 4 .... |
GB |
||
GD |
저장위치 + 0 저장위치 + 1 |
입력 카드 수 (0 ~ 99) 출력 카드 수 (0 ~ 99) |
GE |
저장위치 + 0 저장위치 + 1 저장위치 + 2 ... |
접점 카드 수 3 ~ 0 Bit : 접점 1 ~ 4 .... |
<표 2> DASA MOTION Controller 프로토콜의 읽기 종류에 따른 저장위치 및 저장내용
출력은 SCAN File과 상관없이 PLC의 직접 ADDRESS에 쓴다.
디지털 출력 설정법
디지털 출력 TAG 설정 시 필요한 다섯 가지
1) PORT Printer와 연결된 PORT 번호
2) STATION 읽기/쓰기 종류에 따라 내용이 달라짐. ( 읽기 명령은 <표 1>의 읽을 주소, 쓰기 명령은 <표 3>의 Station 영역 참조 )
3) ADDRESS 각 명령(읽기/쓰기) 의 읽은 내용을 저장할 번지.
4) Extra1 명령어. ( 읽기 명령은 <표1>, 쓰기 명령은 <표 3> 참조 )
AA : Robot 상태 읽기,
AB : Error 상태 읽기,
AC : Position 읽기,
BA : 원점 수행,
BB : 지정된 포인트 파일 내의 점으로 지정한 모션 수행,
BC : 지정된 데이터로 지정한 모션 수행,
BD : 현재 위치에서 증가분 만큼 로봇 이동,
BE : Jog Move 시작,
BF : Jog Move Continue,
BG : Jog Move 정지,
CA : Velocity 읽기,
CB : Velocity 쓰기,
CC : 작업실행,
CD : 작업정지,
CF : 비상정지,
CG : Error 리셋,
CH : 모션정지,
CI : Origin Stop,
CJ : System Reboot,
CE : 작업 초기화,
DA : Moter Power ON/OFF,
DB : Servo ON/OFF,
DC : 실행할 작업파일 설정,
EA : Run Stop Set,
EB : Goto Line,
EC : Break Line 설정,
ED : 수행중인 라인 읽기,
EE : Job Run Mode Exit,
EF : 수행중인 혹은 설정된 파일 읽기,
EG : Break Line 해제,
FC : 제어기에 파일존재 여부 확인,
GA : 입력카드 읽기,
GB : 출력카드 읽기,
GC : 출력카드에 출력하기,
GD : 장착된 카드 개수 읽기,
GE : PLC 입력 읽기,
GF : PLC 출력 카드에 출력 등.
5) Extra2 명령내용을 읽을 파일명 번호 지정. FC(읽기), BB, BC, BD, DC 명령에만 사용. ( 파일명 : cmd_%04.txt )
| 종 류 | 내 용 | STATION | Extra2 | 출력값 |
| BA | 원점 수행 | 사용안함 | 사용안함 | 사용안함 |
| BB | 지정된 포인트 파일 내의 점으로 지정한 모션 수행 | 종류
– 0 : Encoder, 1 : Joint, 2 : XYZ |
명령 파일명 번호 | |
| BC | 지정된 데이터로 지정한 모션 수행 | Data Type 0 : Joint, 1 : ZYZ |
||
| BD | 현재 위치에서 증가분 만큼 로봇 이동 | |||
| BE | Jog Move 시작 | 축 : 0 ~ (축 수 –1) | 방향 – 0 : 음, 1 : 양 | 좌표계 – 0 : Joint, 1 : ZYZ, 2 : TOOL |
| BF | Jog Move Continue | 사용안함 | 사용안함 | 사용안함 |
| BG | Jog Move 정지 | |||
| CB | Velocity 쓰기 | 속도 : 0 ~ 100 | ||
| CC | 작업실행 | 사용안함 | ||
| CD | 작업정지 | |||
| CF | 비상정지 | |||
| CG | Error 리셋 | |||
| CH | 모션정지 | |||
| CI | Origin Stop | |||
| CJ | System Reboot | |||
| CE | 작업 초기화 | |||
| DA | Motor Power ON/OFF | 1 : ON, 0 : OFF | ||
| DB | Servo ON/OFF | |||
| DC | 실행할 작업파일 설정 | 명령 파일명 번호 | 사용안함 | |
| EA | Run Mode Set | 사용안함 | Mode – 연속실행 : 0, 라인별 수행 : 1 |
|
| EB | Goto Line | Line 번호 : 0 ~ 999 | ||
| EC | Break Line 설정 | |||
| EE | Job Run Mode Exit, | 사용안함 | ||
| EG | Break Line 해제 | Line 번호 : 0 ~ 999 | ||
| FC | 제어기에 파일존재 여부 확인 | 명령 파일명 번호 | 사용안함 | |
| GC | 출력카드에 출력하기 | 출력카드 번호 : 0 ~ 99 | 접점번호 : 0 ~ 99 | Data – HIGH : 1, LOW : 0 |
| GF | PLC 출력 카드에 출력 |
<표 3> DASA MOTION Controller 프로토콜의 쓰기 종류에 따른 Station, Extra2, 출력 값의 내용
cmd_%04d.txt 파일 작성규칙)
a) % 04d 는 Extra2 값을 사용. 예1) Extra2 가 0 일 때 파일 명 : cmd_0000.txt, 예2) Extra2 가 1 일 때 파일 명 : cmd_0001.txt 이다.
b) 각 입력인자의 구분은 콤마 ( , ) 로 한다.
c) 파일명은 문자열 (AA.PNT.. 등) 로 입력하고 나머지 인자는 숫자로 입력한다.
아날로그 출력 설정법
디지털 출력과 동일하게 사용하고 출력 값만 다르다.
예 1) Station:0 Address:0000, Extra1:BE, Extra2:1, 로 설정하고 2.0 의 아날로그 값을 출력하면 1축, 양의 방향, TOOL 좌표계 Jog Move 시작 명령을 콘트롤러에 전송한다.
예 2) Station:1 Address:0000, Extra1:GC, Extra2:2 로 설정하고 1.0 (0.0) 의 아날로그 값을 출력하면 출력카드 1번, 접점번호 2번 (3번째) 출력카드에 HIGH(LOW) 상태 출력 명령을 전송한다.
예 3) Station:0 Address:0050, Extra1:AC, Extra2:빈칸 으로 설정하고 아날로그 또는 디지털 출력을 하면 50번지 WORD 메모리부터 모션 콘트롤러의 Encoder Position 내용을 저장한다.