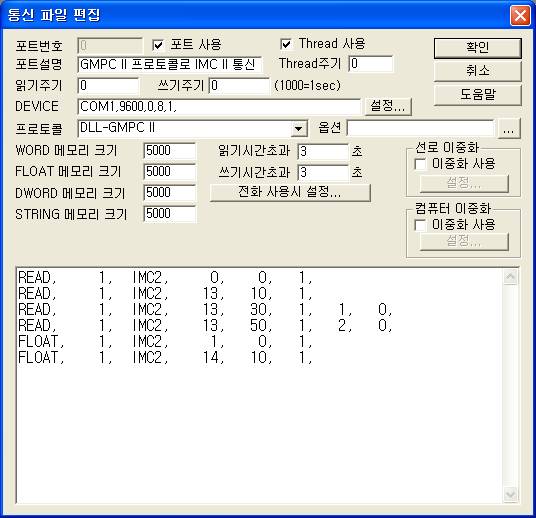
GMPC 프로토콜로 IMC II ( Intelligent Motor Controller ) 와 통신 연결을 할 때 다음과 같은 방법으로 읽기/쓰기를 설정한다.
<그림 1> GMPC 프로토콜로 IMC II 를 사용할 때의 통신설정 예
GMPC의 통신속도, 및 DATA BIT 등은 GMPC에 설정된 속도와 일치하여야 하고 이 속도조절은 GMPC 뒷면 또는 전면 버튼 ( GMPC III ) 등으로 설정한다.
IMC II 사용 시의 읽기 작성 형식
GMPC 프로토콜로 IMC II 장비의 읽기 형식은 다음과 같은 인자 순으로 사용한다.
1) ID – 연결된 IMC2의 스테이션 번호. (0~255)
2) 장비종류 – IMC2 – IMC II 기종.
3) 읽을 종류 - 읽고자 하는 영역 종류. (0, 1, 13, 14 등)
4) 통신 메모리 저장 위치 - 읽은 값이 저장될 ScanBuf의 위치.
5) 읽는 크기 : 읽어올 크기. 항상 1로 설정. (읽을 종류에 따라 읽는 크기는 고정, <표 1>, <표 2> 참조.)
6) 상세 읽을 종류 : 읽을 종류가 13, 14 일 때 상세 읽을 종류를 0 ~ 2 중에서 입력. 생략 시는 0
읽기 설정예)
READ, 1, IMC2, 0, 0, 1,
READ, 1, IMC2, 13, 10, 1, 1, 0,
READ, 1, IMC2, 13, 30, 1, 2, 0,
READ, 1, IMC2, 13, 50, 1,
FLOAT, 1, IMC2, 1, 0, 1,
FLOAT, 1, IMC2, 14, 10, 1,
IMC II 장비의 읽을 종류에 따른 내용은 <표 2> ~ <표 8> 과 같다.
| 읽을 종류 | 상세 읽을 종류 | 내용 | 데이터 형식 | 데이터 개수 | 비 고 |
| 0 | 사용안함 | 상태정보 읽기 | Bit 별 | 6 개의 Byte | <표 2> 참조 |
| 1 | 전류 값 읽기 | Float | 3개의 Float | <표 3> 참조 | |
| 13 | 0 | 설정 값 1 읽기/쓰기 | Byte/Bit 등 | 10 Byte, 1 Bit, 1 Word | <표 4> 참조 |
| 1 | 설정 값 2 읽기/쓰기 | Byte/Bit 등 | 10 Byte, 1 Word | <표 5> 참조 | |
| 2 | 설정 값 3 읽기/쓰기 | Word | 3개의 Word | <표 6> 참조 | |
| 14 | 0 | 고장전류 읽기 | Float | 3개의 Float | <표 7> 참조 |
| 1 | 고장지락전류 읽기 | Float/Word/Byte | 1 Float, 1 Word, 1Byte | <표 8> 참조 |
<표 1> IMC II 장비의 읽을 종류별 내용과 데이터 형식
저장위치 |
내 용 |
값 범위 |
비 고 |
저장위치 + 0 |
운전상태 |
1h, 2h, 4h, 8h |
0 Bit = On, 1 Bit = Rev, 2 Bit = Stop, 3 Bit = Reset |
저장위치 + 1 |
운전 Mode |
1h, 2h, 4h, 8h |
0 Bit = Local, 1 Bit = MCC, 2 Bit = Remote, 3 Bit = Auto |
저장위치 + 2 |
Trip 상 표시, pre-alarm |
1h, 10h, 20h, 30h |
0 Bit = 과 전류, 4 ~ 5 Bit = R, S, T 상 Trip |
저장위치 + 3 |
Trip 원인 |
1h |
0 Bit = Timer2 Error(정수장 모드 ) |
저장위치 + 4 |
1h, 2h, 4h, 8h, 10h, 20h, 40h, 80h |
0 Bit = 과 전류, 1 Bit = 결상, 2 Bit = 불 평형, 3 Bit = 저 전류, 4 Bit = Stall, 5 Bit = Lock, 6 Bit = 지락, 7 Bit = 역상, |
|
저장위치 + 5 |
|
1h, 2h, 4h, 8h, 10h |
0 Bit = Input Fail, 1 Bit = Output Fail, 3 Bit = eeprom data init, 4 Bit = uncalibrated |
<표 2> IMC II 의 읽을 종류가 0 일 때의 읽은 내용 저장위치와 의미 (6 바이트 데이터)
저장위치 |
내 용 |
비 고 |
저장위치 + 0 ~ 2 |
R, S, T 상 전류 |
Float 값 |
<표 3> IMC II 의 읽을 종류가 1 일 때의 읽은 내용 저장위치와 의미 (3 개의 Float 데이터)
저장위치 |
내 용 |
값 범위 |
비 고 |
저장위치 + 0 |
동작시간 |
1 ~ 60 |
|
저장위치 + 1 |
CT Type |
0 또는 1 |
CT Type 0 : 0.5 ~ 6 CT Type 1 : 5 ~ 60 실제 값 = 값 / 10 |
저장위치 + 2 |
정격전류 |
5 ~ 60 : CT = 0, 50 ~ 600 : CT = 1 |
|
저장위치 + 3 |
기동방법 |
1, 2, 4, 8 |
|
저장위치 + 4 |
리액터 운전시간 |
1 ~ 60 |
|
저장위치 + 5 |
Y 기동시간 |
|
|
저장위치 + 6 |
Y-D 절환시간 |
0, 1, 2 |
|
저장위치 + 7 |
CT Ratio |
1 ~ 200 |
실제 값 = 값 / 5 |
저장위치 + 8 |
Lock 보호 |
0 ~ 6 |
|
저장위치 + 9 |
Lock delay time |
1 ~ 200 |
|
저장위치 + 10 |
Stall 보호 |
0 ~ 3 |
|
저장위치 + 11 |
결상보호기능 사용 |
0, 1 |
|
<표 4> IMC II 의 읽을 종류가 13 이고 상세 읽을 종류가 0 일 때의 읽은 내용 저장위치와 의미
저장위치 |
내 용 |
값 범위 |
비 고 |
저장위치 + 0 |
불 평형 보호기능 |
0 ~ 3 |
|
저장위치 + 1 |
역상 보호기능 |
0, 1 |
|
저장위치 + 2 |
지락 보호기능 |
|
|
저장위치 + 3 |
ZCT 설정 |
|
|
저장위치 + 4 |
지락 동작전류 설정 |
0 ~ 6 |
|
저장위치 + 5 |
지락 동작시간 설정 |
5, 10 ~ 100 |
실제 값 = 값 / 10 |
저장위치 + 6 |
기동 시 지락 Lock 기능 |
0, 1 |
|
저장위치 + 7 |
저 전류 보호 |
0 ~ 9 |
|
저장위치 + 8 |
정전보상 시간 |
0 ~ 10 |
|
저장위치 + 9 |
재 기동 Delay 시간 |
0 ~ 300 |
Word 데이터 |
저장위치 + 10 |
과 전류 Mode |
0, 1 |
|
<표 5> IMC II 의 읽을 종류가 13 이고 상세 읽을 종류가 1 일 때의 읽은 내용 저장위치와 의미
저장위치 |
내 용 |
값 범위 |
비 고 |
저장위치 + 0 ~ 2 |
Timer 1 ~ 3 Set |
0 ~ 300 |
Word |
<표 6> IMC II 의 읽을 종류가 13 이고 상세 읽을 종류가 2 일 때의 읽은 내용 저장위치와 의미
저장위치 |
내 용 |
비 고 |
저장위치 + 0 ~ 2 |
R, S, T 상 전류 |
Float 값 |
<표 7> IMC II 의 읽을 종류가 14 이고 상세 읽을 종류가 0 일 때의 읽은 내용 저장위치와 의미
저장위치 |
내 용 |
비 고 |
저장위치 + 0 |
지락 전류 |
Float 값 |
저장위치 + 1 |
Trip 원인 ( <표 2> 참조 ) |
0 Bit = Timer2 Error(정수장 모드 ) |
저장위치 + 2 |
0 Bit = 과 전류, 1 Bit = 결상, 2 Bit = 불 평형, 3 Bit = 저 전류, 4 Bit = Stall, 5 Bit = Lock, 6 Bit = 지락, 7 Bit = 역상, |
|
저장위치 + 3 |
Trip 상 표시 |
0 Bit = 과 전류, 4 ~ 5 Bit = R, S, T 상 Trip |
<표 8> IMC II 의 읽을 종류가 14 이고 상세 읽을 종류가 1 일 때의 읽은 내용 저장위치와 의미
IMC2 설정을 REMOTE로 했을 때만 PC에서 제어가 가능하다.
GMPC 프로토콜을 이용한 IMC II 디지털 출력 설정법
디지털 출력명령으로 모터 On/Off 등의 조작을 할 수 있다.
디지털 출력 TAG 설정 시 필요한 설정 5 가지
1) PORT : GMPC와 연결된 PORT번호. ( 0 ~ 255 )
2) STATION : 설정된 IMC2의 ID ( 0~255 ).
3) ADDRESS : 제어 명령.
0000 – Forward ON/Stop 운전,
0001 – Reverse ON/Stop 운전,
0002 – Reset ( On/ Off 모두 )
4) EXTRA1 : 장비 종류.
IMC2 – IMC II
5) EXTRA2 : 사용안함
설정 예1)
PORT : 0 Station : 1, ADDRESS : 0000 EXTRA1 : IMC2, EXTRA2 : 빈칸으로 설정하고 디지털 출력을 하면 1번 IMC II 의 Forward 운전 제어를(ON/OFF) 할 수 있다.
설정 예2)
PORT : 0 Station : 1, ADDRESS : 0001 EXTRA1 : IMC2, EXTRA2 : 빈칸으로 설정하고 디지털 출력을 하면 1번 IMC II 의 Reverse 운전 제어를(ON/OFF) 할 수 있다.
설정 예3)
PORT : 0 Station : 1, ADDRESS : 0002 EXTRA1 : IMC2, EXTRA2 : 빈칸으로 설정하고 디지털 출력을 하면 1번 IMC II 장비를 Reset 시킬 수 있다.
GMPC 프로토콜을 이용한 IMC II 아날로그 출력 설정법
아날로그 출력명령으로 장비의 설정 값을 변경(입력) 할 수 있다.
아날로그 출력 TAG 설정 시 필요한 설정 5 가지
1) PORT : GMPC와 연결된 PORT번호. ( 0 ~ 255 )
2) STATION : 설정된 IMC2의 ID ( 0~255 ).
3) ADDRESS : 제어 명령.
0000 ~ 0010 – 설정 1 ~ 2 (Extra2 = 0 ~ 1 ) 출력번지. 출력번지 및 값 범위는 <표 9> ~ <표 10> 참조
0000 ~ 0002 – 설정 3 쓰기 출력번지. 출력번지 및 값 범위는 <표 11> 참조
4) EXTRA1 : 장비 종류.
IMC2 – IMC II
5) EXTRA2 : 설정 1 ~ 3 선택.
0 – 설정 값 1
1 – 설정 값 2
2 – 설정 값 3
| 출력번지 | 내 용 | 값 범위 | 비 고 |
| 0000 | 동작시간 | 1 ~ 60 | |
| 0001 | 정격전류 | 5 ~ 60 : CT = 0,50 ~ 600 : CT = 1 | 실제 값 = 값 / 10 |
| 0002 | 기동방법 | 1, 2, 4, 8 | |
| 0003 | 리액터 운전시간 | 1 ~ 60 | |
| 0004 | Y 기동시간 | ||
| 0005 | Y-D 절환시간 | 0, 1, 2 | |
| 0006 | CT Ratio | 1 ~ 200 | 실제 값 = 값 / 10 |
| 0007 | Lock 보호 | 0 ~ 6 | |
| 0008 | Lock delay time | 1 ~ 200 | |
| 0009 | Stall 보호 | 0 ~ 3 | |
| 0010 | 결상보호기능 사용 | 0, 1 |
<표 9> IMC II 의 설정 값 1의 출력번지별 출력 내용과 값 범위
출력번지 |
내 용 |
값 범위 |
비 고 |
0000 |
불 평형 보호기능 |
0 ~ 3 |
|
0001 |
역상 보호기능 |
0, 1 |
|
0002 |
지락 보호기능 |
|
|
0003 |
ZCT 설정 |
|
|
0004 |
지락 동작전류 설정 |
0 ~ 6 |
|
0005 |
지락 동작시간 설정 |
5, 10 ~ 100 |
실제 값 = 값 / 10 |
0006 |
기동 시 지락 Lock 기능 |
0, 1 |
|
0007 |
저 전류 보호 |
0 ~ 9 |
|
0008 |
정전보상 시간 |
0 ~ 10 |
|
0009 |
재 기동 Delay 시간 |
0 ~ 300 |
|
0010 |
과 전류 Mode |
0, 1 |
|
<표 10> IMC II 의 설정 값 2의 출력번지별 출력 내용과 값 범위
출력번지 |
내 용 |
값 범위 |
0000 ~ 0002 |
Timer 1 ~ 3 Set |
0 ~ 300 |
<표 11> IMC II 의 설정 값 1의 출력번지별 출력 내용과 값 범위
설정 예1)
PORT : 0 Station : 1, ADDRESS : 0000 EXTRA1 : IMC2, EXTRA2 : 0 으로 설정하고 아날로그 출력을 하면 1번 IMC II 장비의 동작시간을 설정한 값으로 ( 1 ~ 60 사이 값 ) 변경할 수 있다.
설정 예2)
PORT : 0 Station : 1, ADDRESS : 0006 EXTRA1 : IMC2, EXTRA2 : 0 으로 설정하고 아날로그 출력을 하면 1번 IMC II 장비의 CT Ratio를 설정한 값으로 ( 1 ~ 200 사이 값 ) 변경할 수 있다.
설정 예3)
PORT : 0 Station : 1, ADDRESS : 0009 EXTRA1 : IMC2, EXTRA2 : 1 로 설정하고 아날로그 출력을 하면 1번 IMC II 장비의 재기동 Delay 시간을 설정한 값으로 ( 0 ~ 300 사이 값 ) 변경할 수 있다.
설정 예4)
PORT : 0 Station : 1, ADDRESS : 0000 EXTRA1 : IMC2, EXTRA2 : 2 로 설정하고 아날로그 출력을 하면 1번 IMC II 장비의 Timer1 Set 를 설정한 값으로 ( 0 ~ 300 사이 값 ) 변경할 수 있다.
전원연결
<그림 2>와 같은 IMC II 단자 대의 23, 24 번 단자에 11/220 VAC 전원을 연결한다.

<그림 2> IMC II 단자 대에 전원과 통신 케이블 등을 연결한 모습
RS-485 통신 케이블 연결
IMC II 의 27, ( Rx0 ) 28 ( Rx1 ), 29 ( Tx0 ), 30 ( Tx1 ) 번 단자에 I-Net RS-485 통신 케이블을 연결한다.