YASKAWA NX100 Robot is driver to communicate with NX100 Robot device of Yaskawa Co. in Japan.
1. Read settings
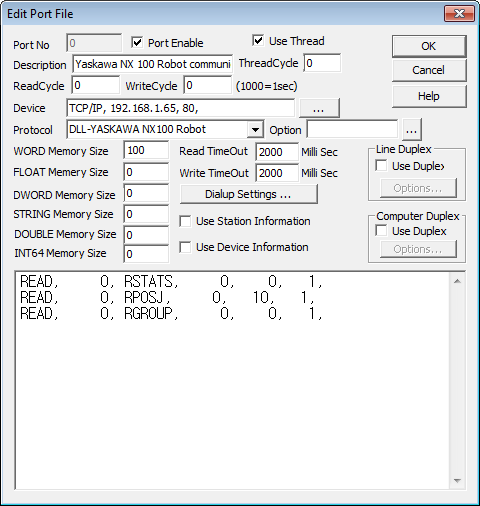
<Figure 1> is read setting example of YASKAWA NX100 Robot communication driver.
|
| <Figure 1> Read setting example of YASKAWA NX100 Robot driver |
Device part of <Figure 1> input Device type(TCP/IP), IP address of NX100 device(192.168.1.65), Service port(fixed to 80).
YASKAWA NX100 Robot driver read schedule
Read schedule setting parameters are as follows:
1) STATION – Don't care.
2) Read Command – Set among the RALARM, RPOSJ, RPOSC, RSTATS, RJSEQ, RGROUP, RJDIR, RUFRAME, SAVEV and IOREAD. (Refer to <Table 1>)
3) Read Start Address – Don't care.
4) Save Start Address for Communication Server - Saving start address of Communication Server.
5) Read Size – Always fixed to 1. Fixed to according to read command. (Refer to <Table 1>)
6) Command Data1 – Set the command data 1 value of read command such as RPOSC, RUFRAME, SAVEV, IOREAD. (Refer to <Table 1>)
7) Command Data2 – Set the command data 2 value of read command such as RPOSC, SAVEV, IOREAD. (Refer to <Table 1>)
Read schedule example)
READ, 0, RSTATS, 0, 0, 1,
READ, 0, RPOSJ, 0, 10, 1,
READ, 0, RGROUP, 0, 20, 1,
<Table 1> is command type and save address of read data for YASKAWA NX100 Robot communication driver.
| Read command | Command contents | Command data1 |
Command data2 |
Save address for read value |
| RALARM | Read Error Alarm | None |
Save address + 0 : Error code 1 Save address + 1 : Error data 1 Save address + 2 : Error code 2 Save address + 3 : Error data 2 … Save address + 8 : Error code 5 Save address + 9 : Error data 5 |
|
| RPOSJ | Read current position of Joint coordinate system | None |
Save address + 0 ~ 5 : The number of S/L/U/R/B/T-axis pulse Save address + 6 ~ 11 : The number of 7/8/9/10/11/12-axis pulse |
|
| RPOSC | Read current position of Specific coordinate system | Specification of coordinate system (0 = Base, 1 = Robot, 2 ~ 25 = User1 ~ 24) |
with or without external axis (0 = without, 1 = with) |
Save address + 0 ~ 2 : X/Y/Z coordinate value Save address + 3 ~ 5 : Wrist each TX/TY/TZ Save address + 6 : Type Save address + 7 : Tool number(value among the 0 to 23) Save address + 8 ~ 13 : The number of no.7 ~ no.12 axis |
| RSTATS | Read state information | None |
Save address + 0 : State information 1 (0 bit : Step, 1 bit : 1 Cycle, 2 bit : Auto, 3 bit : Run, 4 bit : safety speed, 5 bit : Teach, 6 bit : Play, 7 bit : Remote) Save address + 1 : State information 2 (0 bit : ???, 1 bit : Hold program, 2 bit : Hold external, 3 bit : Hold command, 4 bit : Alarm, 5 bit : Error, 6 bit : Servo ON, 7 bit : ???) |
|
| RJSEQ | Read current project, line/step number | None |
Save address + 0 : Project name (Refer to string memory) Save address + 1 : Line number(0 ~ 9999) Save address + 2 : Step number(0 ~ 9999) |
|
| RGROUP | Read current control group | None |
Save address + 0 : Robot control group information (0 ~ 3 bit : Robot 1 ~ 4) Save address + 1 : Station control group information (0 ~ 11 bit : Station 1 ~ 12) Save address + 2 : Project information (0 = Master project, 1 ~ 7 = Sub1 ~ 7 project) |
|
| RJDIR | Read all project names | None |
Save address + 0 ~ n : Project name(Refer to string memory) (n = The number of registered project name) |
|
| RUFRAME | Read Specified user coordinate data | User coordinate number (2~25 = User1~24) |
None |
Save address + 0 ~ 2 : ORG X/Y/Z coordinate value Save address + 3 ~ 5 : ORG Wrist each TX/TY/TZ Save address + 6 : ORG Type Save address + 7 ~ 9 : XX X/Y/Z coordinate value Save address + 10 ~ 12 : XX Wrist each TX/TY/TZ Save address + 13 : XX Type Save address + 14 ~ 16 : XY X/Y/Z coordinate value Save address + 17 ~ 19 : XY Wrist each TX/TY/TZ Save address + 20 : XY Type Save address + 21 : Tool number(value among the 0 to 23) Save address + 22 ~ 27 : The number of no.7 ~ no.12 axis |
| SAVEV | Read Variable value | Variable value form (0 = Byte, 1 = Int, 2 = Double, 3 = Real 4 = Robot axis, 5 = Base axis, 6 = Station Axis |
Variable No. |
When Variable type is 0 to 3 Save address + 0 : Byte/Int/Double/Real value
When Variable type is 4 to 6 Save address + 0 : Position data type (0 : Pulse, 1 = Cartesian) Save address + 1 ~ 6 : The number of S/L/U/R/B/T axis pulse robot Save address + 7 : Tool No. Save address + 8 ~ 9 : Not exist |
| IOREAD | Read I/O Signal | Contact point number to start to read (ex : 50010 ) |
The number of Contact point to read (ex : 24 ) |
Save address + 0 ~ N : Each Contact point value of 8 (no.0 ~ no.7 bit) |
| <Table 1> Read command type and save address for read value of YASKAWA NX100 Robot communication driver | ||||
Notice) YASKAWA NX100 Robot communication driver store the same data in WORD, DWORD, FLOAT, DOUBLE, INT64 memory, but the data format are different.
If you click the icon
![]() in protocol
option part, you can see the dialog box such as <Figure 2>. you can also set
read schedule by using this part.
in protocol
option part, you can see the dialog box such as <Figure 2>. you can also set
read schedule by using this part.
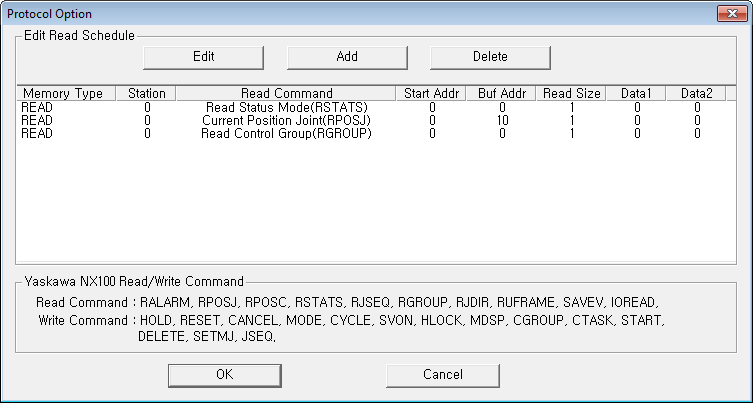 |
| <Figure 2> Example of YASKAWA NX100 Robot communication driver's Option dialog box |
You can set read schedule by using
![]() ,
,
![]() ,
,
![]() button and
listbox of <Figure 2>.
button and
listbox of <Figure 2>.
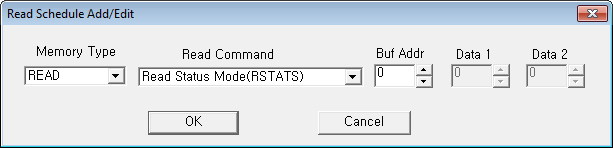 |
| <Figure 3> Example of YASKAWA NX100 Robot communication driver's read schedule Add/Edit dialog box |
When you click Add button or Edit button in dialog box of <Figure 2>, dialog box of <Figure 3> is shown.
You can change the setting value by using the write setting of YASKAWA NX100 Robot communication driver.
Digital Write
Digital write and analog write have the same setting parameters except output value(0, 1).
Analog Write
Analog write setting parameters are as follows :
1) Port : Connected Port number. (It is not COM no.)
2) Station : Don't care. (Fixed to 0)
3) Address : Memory start address to save, in case of read command. (Decimal number 0 ~ 9999).
Not use write command.
4) Extra1 : Input among the read command of <Table 1> or HOLD, RESET, CANCEL, MODE, CYCLE, SVON, HLOCK, MDSP, CGROUP, CTASK, START, DELETE, SETMJ and JSEQ.
5) Extra2 : When read command : Use as Command data 1
When write command : Set the Robot control group(Designate the Robot 1 ~ 4 as no.0 ~ no.3 bit) of CGROUP command. Other commands not used.
6) Output value : When read command : Use as Command data 2
When write command : Setting value of HOLD, MODE, CYCLE, SVON, HLOCK, MDSP, CGROUP, CTASK, START, DELETE, SETMJ and JSEQ command. Other commands not used.
<Table 2> is write command type and setting value of YASKAWA NX100 Robot communication driver.
| Write command | Command contents | Extra2 | Output value |
| HOLD | HOLD setting | None | 0 = OFF, 1 = ON |
| RESET | RESET setting | None | |
| CANCEL | Cancel an error | None | |
| MODE | MODE setting | None | 1 = Teach Mode, 2 = Play |
| CYCLE | Select Cycle | None | 1 = Step, 2 = 1 Cycle, 3 = Auto |
| SVON | Servo power ON/OFF | None | 0 = OFF, 1 = ON |
| HLOCK | Interlock ON/OFF | None | 0 = OFF, 1 = ON |
| MDSP | Set the message to display MDSP.??? (??? = Message to display) |
None | |
| CGROUP | Set for changing of control group | Set the Robot control group( Designate the Robot 1 ~ 4 as no.0 ~ no.3 bit), |
Set station no.1 ~ no.12 (Set the station as no.0 ~ no.11) |
| CTASK | Change Task | None | 0 = Master Task, 1 ~ 7 = Sub 1 ~ 7 Task |
| START | Project start command START.??? (??? = Project name to start) |
None | |
| DELETE | Project delete command DELETE.??? (??? = Project name to delete) |
None | |
| SETMJ | Set the designated project as master SETMJ.??? (??? = Project name to set) |
None | |
| JSEQ | Set the project and line number JSEQ.??? (??? = Project name to set) |
None | Input the line number to set |
| <Table 2> Write command type and setting value of YASKAWA NX100 Robot communication driver | |||