YOKOGAWA YS Series(150 etc) communication driver is the driver to communicate with YS series Multi Function controller of Yokogawa M&C in Japan.
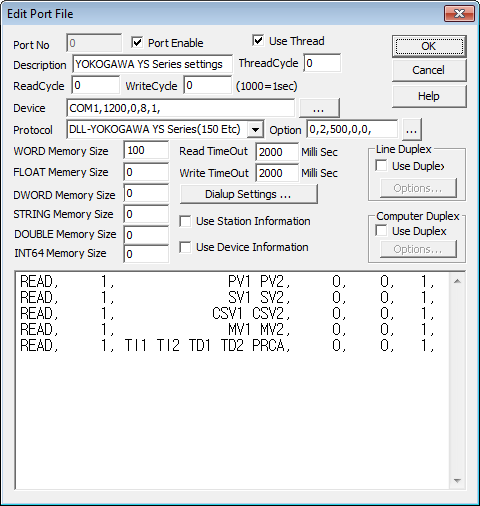
<Figure 1> is read setting example of YOKOGAWA YS Series communication driver.
| |
| <Figure 1> Read setting example of YOKOGAWA YS Series communication driver |
Device part of <Figure 1> input Device type(COM1), Com Baud(1200), Parity Bit(0), Data Bit(8), Stop Bit(1).
Device settings of YOKOGAWA YS Series are changed according to Multi Function controller settings.
Com Baud, Parity, Data and Stop Bit of YOKOGAWA YS Series can be changed by operation control of Multi Function(function of PID, etc) controller.
Read schedule example
| READ | Station | Data Type | Read start address (Don't care) |
Save start address | Read size (Fixed to 1) |
| READ, | 1, | PV1 PV2, | 0, | 0, | 1, |
| READ, | 1, | SV1 SV2, | 0, | 2, | 1, |
| READ, | 1, | CSV1 CSV2, | 0, | 4, | 1, |
| READ, | 1, | MV1 MV2, | 0, | 6, | 1, |
| READ, | 1, | TI1 TI2 TD1 TD2 PRCA, | 0, | 8, | 1, |
1) Station : Station number of YOKOGAWA YS Series Multi Function controller. (1 ~ 16)
2) Data Type : Data type to read such as PV1, PV2, SV1, SV2, etc.
The number of 1 ~ 7 data can be input together by classifying as blank(space). (Ex : PV1 PV2 SV1 SV2 )
3) Read start address : Don't care (Input always 0)
4) Save start address for Communication Server : Buf position to save the read state value.
5) Read size : Read size. (Fixed to 1, it is set automatically according to read contents of data type to read (among the number of 1 ~ 7)
Note) Save the read value from all memory of WORD, DWORD, FLOAT, in case of setting as READ, DWORD, FLOAT, etc. (Part of read/write command is different)
Also, CNT1, CNT2 read command save the read value from WORD, DWORD, FLOAT, STRING memory by classifying.
In case of uncommon read/write data)
LS1, LS2 : MAN = 0, AUT = 1, CAS = 2, SPC = 3, DDC = 4, BUM = 5, BUA = 5.
PRCA, SYSA, SLS1, SLS2 : no. 0 ~ 7 bit state value (Refer to YS Series manual)
STCA : no. 0 ~ 15 bit state value. (Refer to YS Series manual)
ASW1 ~ ASW6 : no.0 ~ 7 bit state value. (Refer to YS Series manual : Only YS131, YS135, YS136 model)
CNT1, CNT2 : Read six state value and two string, and save that contents to address(no.+ 0 ~ 7) which is save position of read contents.
Save position no.0 ~ 5 : Control Type, Control Computation, Action Direction, Open Valve Direction, C Mode, Backup Mode,
Save position no.6 ~ 7 (only String memory) : Unit (Maximum 6 digit string), Tag Number (Maximum 12 digit string).
SYS1 : Read three state value, and save that contents to save address(no.+ 0 ~ 2).
Save position no.0 ~ 2 : Control Mode, Recovery from Power Failure, Settable by Communications.
SYS2 : Read six state value, and save that contents to save address(no.+ 0 ~ 5).
Save position no.0 ~ 5 : PF key, DI1 Function, DI1 Set Active, Alarm Output Contact Status, SV Tracking, Selector.
ID : Save the ID string to String memory.
Read data type and contents of YS150, YS170 models are the following <Table 1-1> ~ <Table 1-3>, and YS131, YS135, YS136 models are the following <Table 2-1> ~ <Table 2-2>.
If you click the icon
![]() in protocol option part, you
can see the dialog box such as <Figure 2>. you can also set
read schedule by using this part.
in protocol option part, you
can see the dialog box such as <Figure 2>. you can also set
read schedule by using this part.
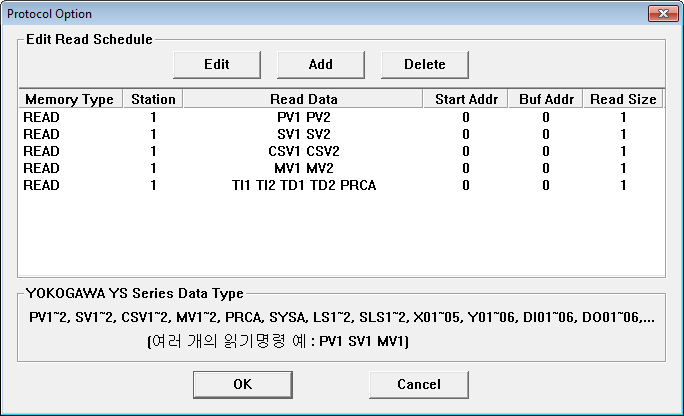 |
| <Figure 2> Example of YOKOGAWA YS Series protocol option dialog box |
You can set read schedule by using
![]() ,
,
![]() ,
,
![]() button and
listbox of <Figure 2>.
button and
listbox of <Figure 2>.
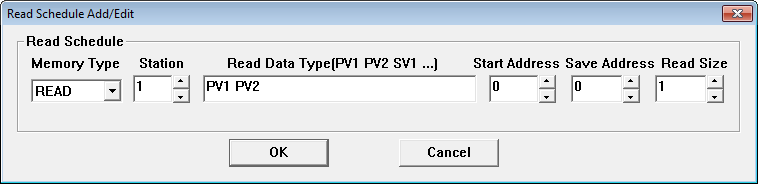 |
| <Figure 3> Example of YOKOGAWA YS Series's read schedule Add/Edit dialog box |
When you click Add button or Edit button in dialog box of <Figure 2>, dialog box of <Figure 3> is shown.
Write to direct address of controller, regardless of SCAN File.
Digital Write
Digital write and analog write have the same setting parameters except output value(0, 1).
Analog Write
Analog write send WORD data value to controller.
You can set SV1, SV2, MV1, MV2 value, etc of Multi Function controller by using the analog writing.
Analog write setting parameters are as follows :
1) PORT Connected Port number.
2) STATION Station number of Multi Function controller. (1 ~ 16).
3) Address In case of Extra2 is 0 : Not use.
In case of Extra2 is number except 1 : Start address to save the read contents as Extra1 command.
4) Extra1 In case of Extra2 is 0 : Data type to output such as SV1, SV2, MV1, MV2 etc. (Output one data at a time)
In case of Extra2 is number except 1 : Data type to output. (The number of 1 ~ 7 data can be input together by classifying as blank(space)).
5) Extra2 0 : Write output.
Except 1 : Read command. (Save read data from Address first)
Write example 1)
PORT : 0 STATION : 1 ADDRESS : 0020 EXTRA1 : PV1 PV2 SV1 SV2 MV1 MV2 EXTRA2 : 1
The setting parameter shown above is example of writing setting.
If you output as digital/analog, it reads PV1, PV2, SV1, SV2, MV1, MV2 value of YS Series equipment and save the read data at WORD, DWORD, FLOAT, STRING Communication Server buffer of address no.20 ~ 25.
Write example 2)
PORT : 0 STATION : 1 ADDRESS : 0055 EXTRA1 : PRCA SYSA EXTRA2 : 1
The setting parameter shown above is example of writing setting.
If you output as digital/analog, it reads PRCA (Process Alarm), SYSA (System Alarm) state of YS Series equipment and save the read data at WORD, DWORD, FLOAT Communication Server buffer of address no.55 (PRCA), 56 (SYSA).
Write example 3)
PORT : 0 STATION : 1 ADDRESS : 0120 EXTRA1 : CNT1 CNT2 EXTRA2 : 1
The setting parameter shown above is example of writing setting.
If you output as digital/analog, it reads CNT1, CNT2(Control Model Set Information1, 2) value of YS Series equipment and save the read data at WORD, DWORD, FLOAT, STRING(Last 2 address : Unit string, Tag string) Communication Server buffer of address no.120 ~127(CNT1), 128~135(CNT2).
Write example 4)
PORT : 0 STATION : 1 ADDRESS : 0000 EXTRA1 : SV1 EXTRA2 : 0
The setting parameter shown above is example of writing setting.
If you writing as analog, SV1 of YS Series equipment is changed as set value(-6.3 ~ 106.3).
Write example 5)
PORT : 0 STATION : 1 ADDRESS : 0000 EXTRA1 : PB1 EXTRA2 : 0
The setting parameter shown above is example of writing setting.
If you writing as analog, PB1(Proportional band) of YS Series equipment is changed as set value(2.0 ~ 999.9).
Write example 6)
PORT : 0 STATION : 1 ADDRESS : 0000 EXTRA1 : DTC EXTRA2 : 0
The setting parameter shown above is example of writing setting.
If you writing as analog, DTC(Watch Dog Timer) of YS Series equipment is changed as set value(0 ~ 9999).
Reference) If you use DTC such as 'Write example 6), You can check whether to exist of system of between YS Series(because, computer have to output DTC, periodically).
Communication cable connection between YOKOGAWA YS Series Multi Function controller and computer.
Connect no.16(SDB : T+), no.15(SDA : T-), no.18(RDB : R+)and no.17(RDA : R-) of YOKOGAWA YS Series's back side terminal block(Refer to <Figure 4>) with
(485 communication terminal) R+, R-, T+, T- of computer side, in order.
YOKOGAWA YS Series side Computer side
No.16 terminal (SDB : T+) ------------------------- R+
No.15 terminal (SDA : T-) ------------------------- R-
No.18 terminal (RDB : R+) ------------------------- T+
No.17 terminal (RDA : R-) ------------------------- T-
Note) A (no.15, no.17 terminal) of RS485 terminal is '–' and B (no.16, no.18 terminal) terminal is '+'.
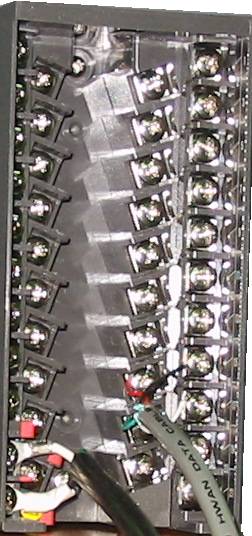 |
| <Figure 4> Back side terminal block of YOKOGAWA YS Series(YS150) |
Basic power connection of YOKOGAWA YS Series) Connect basic power 100~120V AC 50/60HZ or 24~120V DC of <Figure 4> to L+, N-.
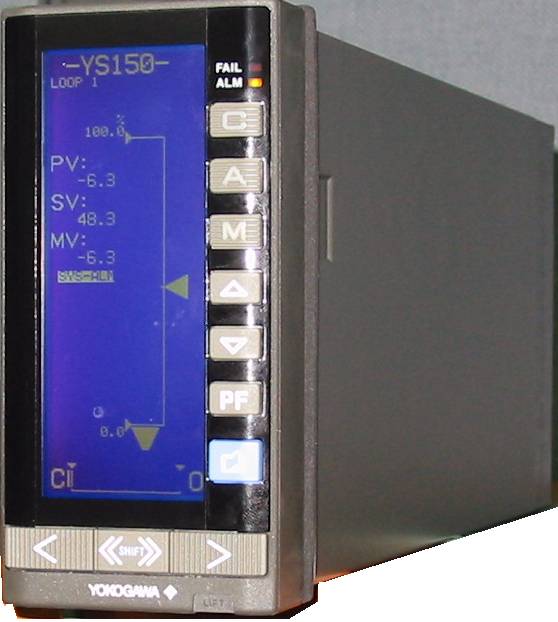 |
| <Figure 5> Front side of YOKOGAWA YS Series(YS150) Multi Function controller |
Meter Address, Com Baud settings
You can set Address(1~16) of Multi Function controller, Com Baud, etc by using the front side control button of YOKOGAWA YS Series(Refer to <Figure 5>).
1) Setting menu screen is shown, when press Shift + Setting switch(button below PF) at the same time.
2) Select 'CONFIG1' of second ENG MENU 1 at setting menu. (Double-click Shift + Setting switch).
3) You can change ADRS, STBIT, PARS, BPS, etc at CONFIG1 menu.
(Possible to set, in case of setting mode only : You can make don't allow to set as PASSWORD)
4. Data type and contents of YOKOGAWA YS Series
| Data Type | Contents | Write enabled | Unit | Data range |
Remarks | Multi function | Program |
| PV1, PV2 | Process variable | - | % | -6.3 ~ 106.3 |
|
○ | ○ |
| SV1, SV2 | Setpoint | OK | % | -6.3 ~ 106.3 |
Possible to set at MAN, AUTO mode |
○ | ○ |
| CSV1, CSV2 | Cascade setpoint | - | % | -6.3 ~ 106.3 |
|
○ | ○ |
| DV1, DV2 | Deviation | - | % | -106.3 ~ 106.3 |
|
○ | ○ |
| MV1, MV2 | Manipulated variable | OK | % | -6.3 ~ 106.3 |
|
○ | ○ |
| PRCA | Process alarm | - | _ | X1 ~ X8 Xn=0(Normal) Xn=1(fail) |
X1 = High limit alarm 1 X2 = Low limit alarm 1 X3 = Deviation alarm1 X4 = Velocity alarm1 X5 = High limit alarm1 X6 = Low limit alarm2 X7 = Deviation alarm2 X8 = Velocity alarm2 |
○ | ○ |
| SYSA | System alarm | - | _ | X1 = Input over range X2 = Output current open X3 = Invalid data X4 = Invalid data X5 = Computed over flow X6 = Erased RAM memory X7 = Invalid data X8 = Invalid data |
○ | ○ | |
| LS1 | Action mode 1 | OK | - | MAN = 0, AUT = 1, CAS = 2, SPC = 3, DDC = 4, BUM = 5, BUA = 6 |
Can’t set to BUM or BUA modes |
○ | ○ |
| LS2 | Action mode 2 | OK | - | According to LS1 |
|
○ | ○ |
| SLS1, SLS2 | Sub action mode | - | - | X1 ~ X8 Xn=0(Normal) Xn=1(fail) |
X1 = Output tracking switch X1 = Preset output switch X3 ~ X8 = invalid data |
○ | ○ |
| X01 ~ X05 | Analog input register | % | -25.0 ~ 125.0 |
In Multi-function mode, X01 to X04 are valid. |
○ | ○ | |
| Y01 ~ Y06 | Analog output register | % | -25.0 ~ 125.0 |
In Multi-function mode, X01 to X03 are valid. |
○ | ○ | |
| DI01 ~ DI06 | Status input register | - | 0,1(0=OFF, 1=ON) |
In Multi-function mode, only DI1 is valid. |
○ | ○ | |
| DO01 ~ DO16 | Status output register | - | 0,1(0=OFF, 1=ON) |
In Multi –function mode, DO1 to DO5 are valid. |
○ | ○ | |
| P01 to P30 | Computation parameterregister | OK | % | -800.0 ~ 800.0 |
|
○ | |
| T01 ~ T30 | Temporary storage register | % | -800.0 ~ 800.0 |
|
○ | ||
| K01 ~ K30 | Constant register | % | -800.0 ~ 800.0 |
|
○ | ||
| <Table 1-1> Data type and contents of YOKOGAWA YS150, YS170 model | |||||||
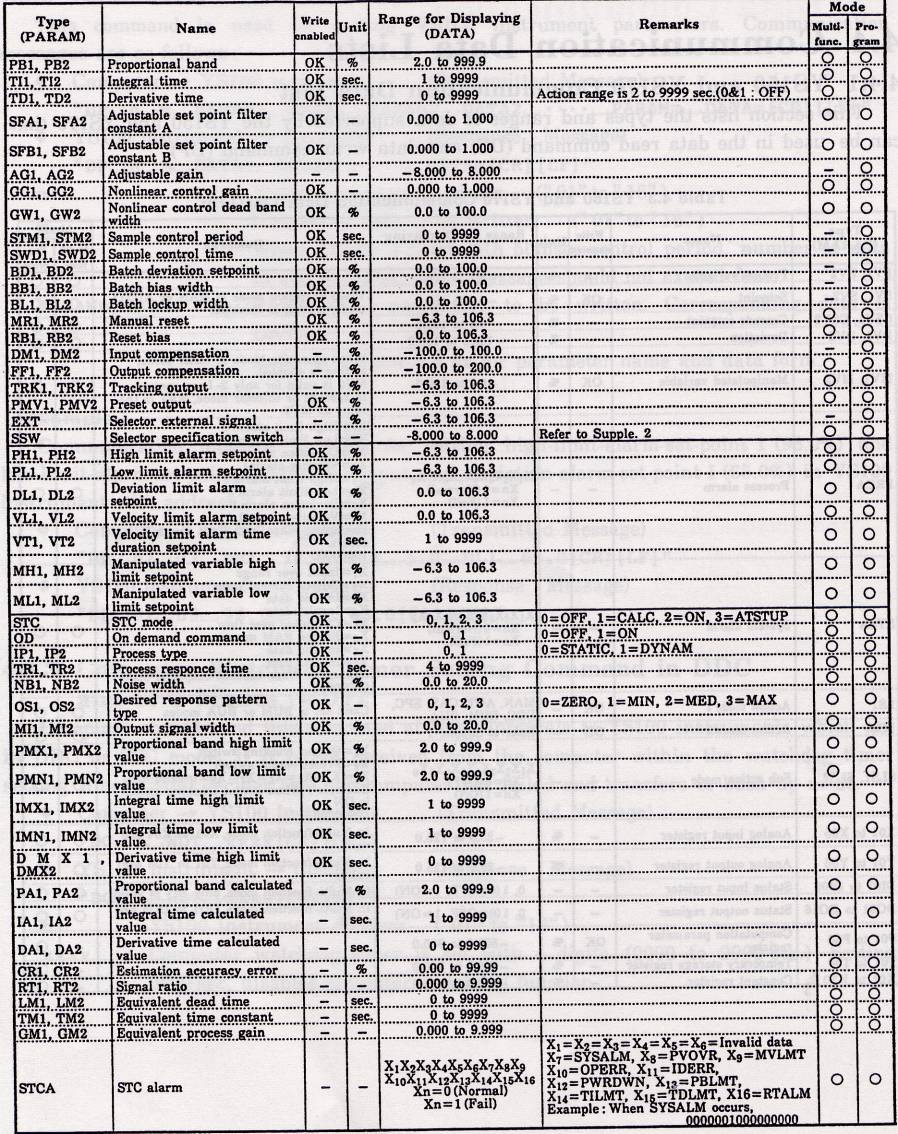 |
| <Table 1-2> Data type and contents of YOKOGAWA YS150, YS170 model |
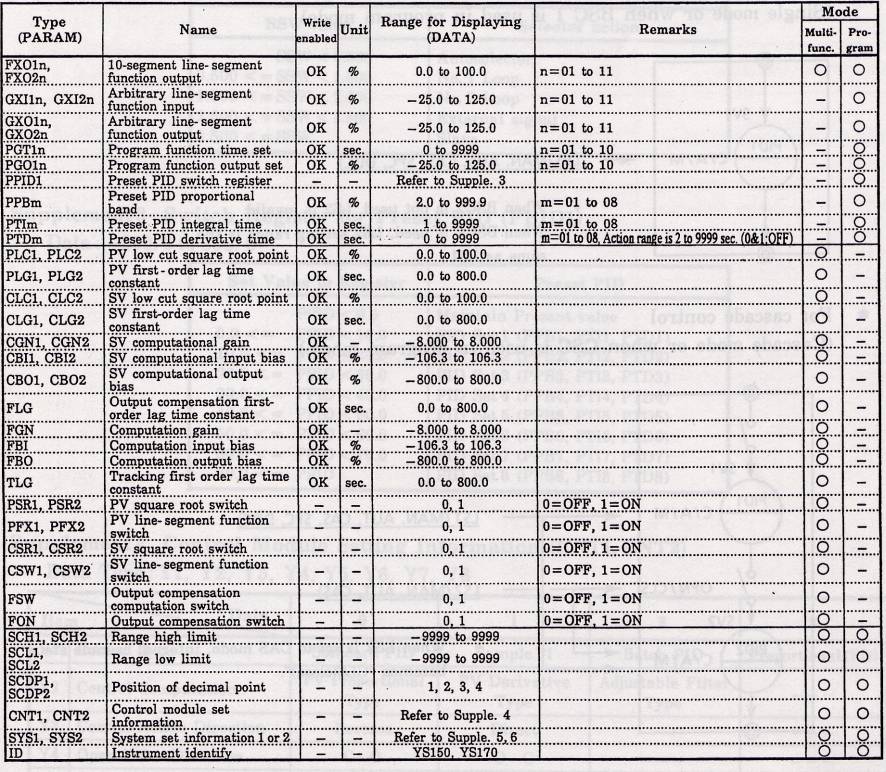 |
| <Table 1-3> Data type and contents of YOKOGAWA YS150, YS170 model |
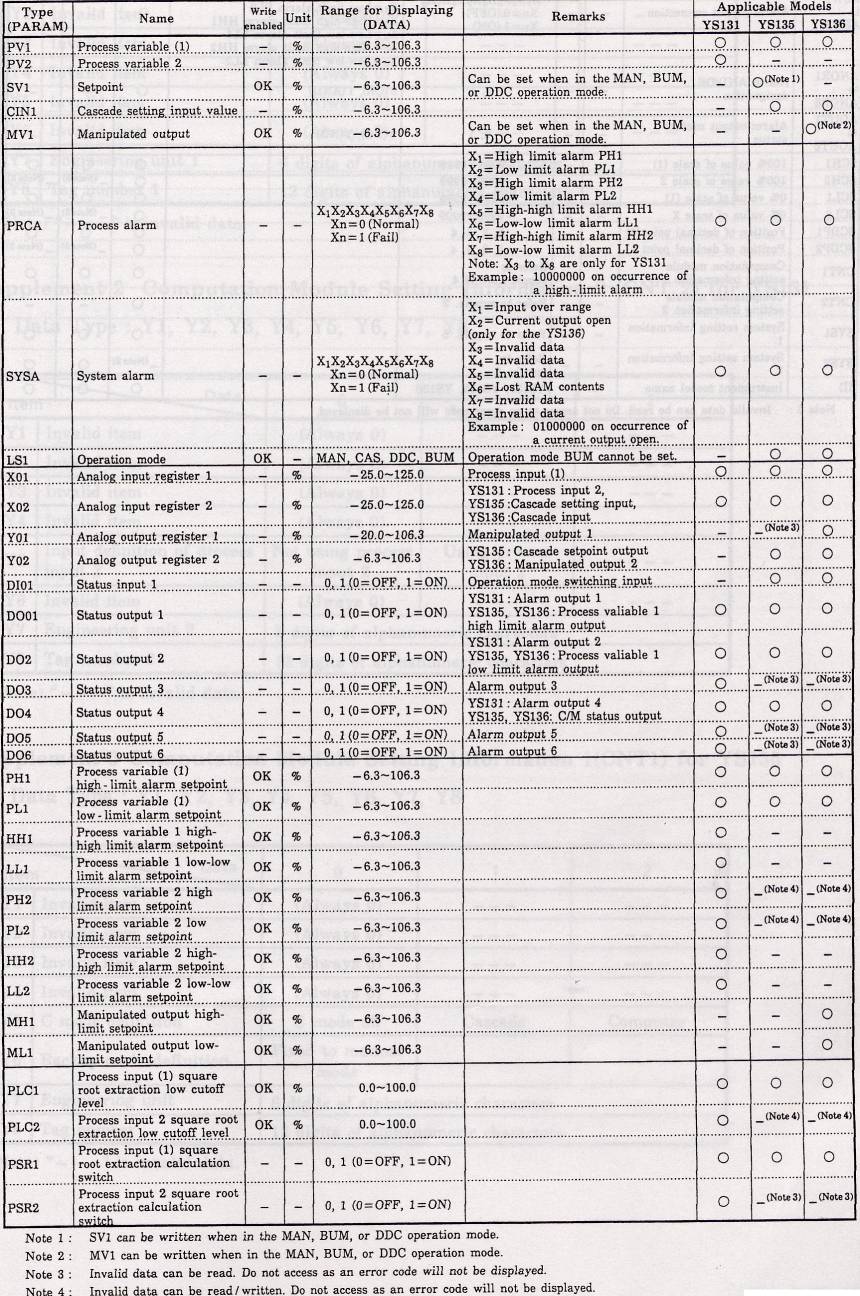 |
| <Table 2-1> Data type and contents of YOKOGAWA YS131, YS135, YS136 model |
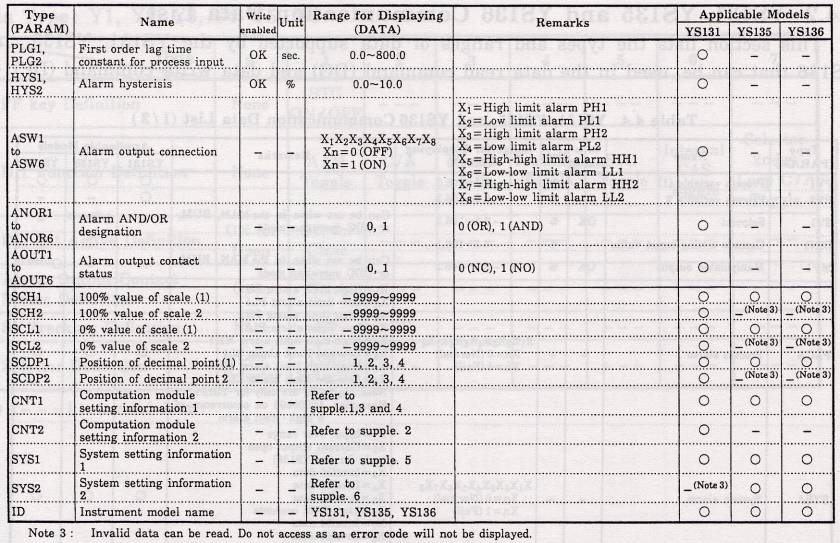 |
| <Table 2-2> Data type and contents of YOKOGAWA YS131, YS135, YS136 model |
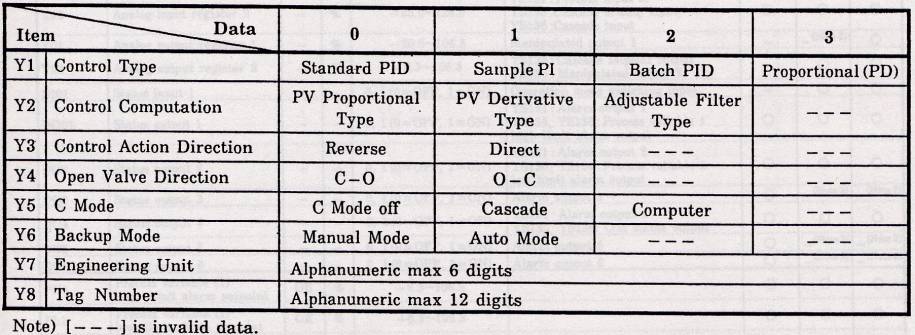 |
| <Table 3> CNT1 and CNT2 data contents of YOKOGAWA YS150, YS170 model |
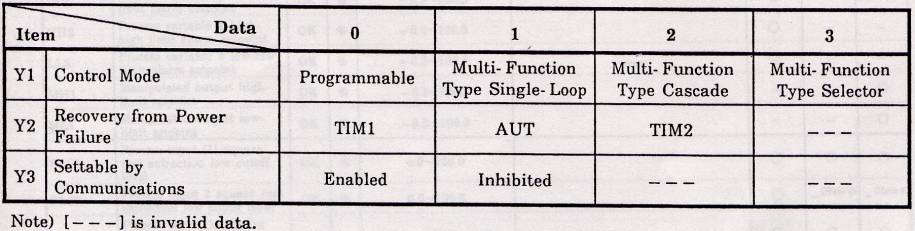 |
| <Table 4> SYS1 data contents of YOKOGAWA YS150, YS170 model |
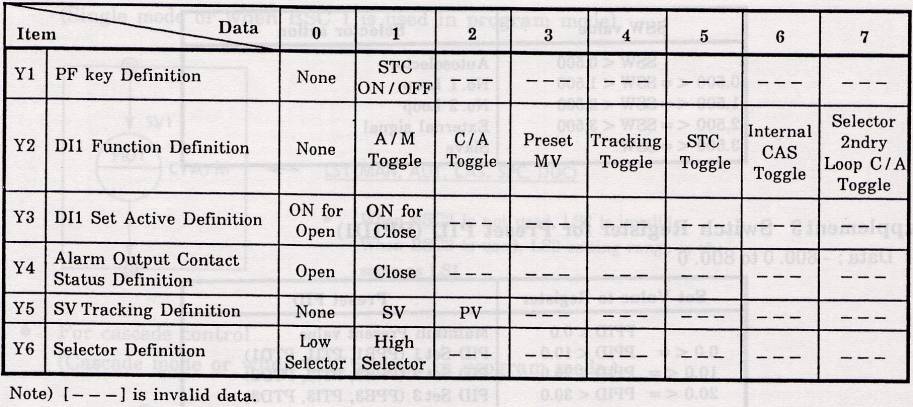 |
| <Table 5> SYS2 data contents of YOKOGAWA YS150, YS170 model |