OSC communication driver is the driver to communicate with oscillator controller of Korea Instrument Co., Ltd. in Korea.
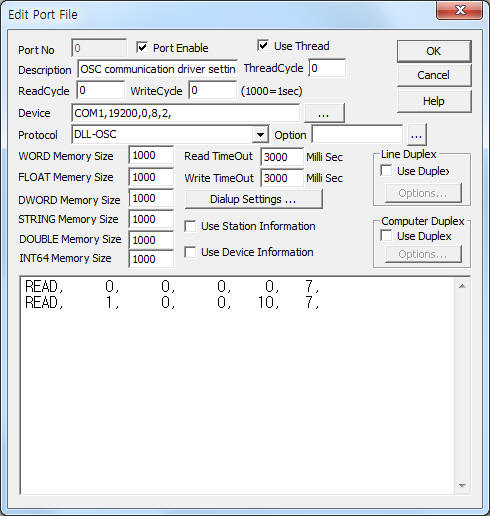
<Figure 1> is read setting example of OSC communication driver.
|
|
| <Figure 1> Read setting example of OSC communication driver |
Device part of <Figure 1> input Com Port(COM1), Baud Rate(19200), Parity Bit(0), Data Bit(8), Stop Bit(2) respectively, according to setting of controller.
OSC communication driver read schedule
Read schedule setting parameters are as follows:
1) Station – 0 ~ 32 controller station number.
2) Reading module type – don't care.
3) Read start address – don't care.
4) Save start address for Communication Server – Saving start address of Communication Server.
5) Read size – fixed to 1. ( Remote mode = 7byte, Local mode 10 byte )
Read schedule example)
READ, 0, 0, 0, 0, 7,
READ, 1, 0, 0, 10, 7,
<Table 1>, <Table 2> are data saving address and contents when Remote, Local mode.
| Data saving address | Contents |
| start addr + 0 | standard zero point |
| start addr + 1 | CW |
| start addr + 2 | criteria angle |
| start addr + 3 | CCW |
| start addr + 4 | SYNC alarm status |
| start addr + 5 | CT alarm status |
| start addr + 6 | status value of CNT |
| <Table 1> Data saving address and contents when Remote mode | |
| Data saving address | Contents |
| 500 + station no. x 10 + 0 | modifying (0xC1 : Stop, 0x01 : Run) |
| 500 + station no. x 10 + 1 | rotation angle |
| 500 + station no. x 10 + 2 | rotation velocity |
| 500 + station no. x 10 + 3 | standard direction |
| 500 + station no. x 10 + 4 | SYNC alarm status |
| 500 + station no. x 10 + 5 | SYNC DB |
| 500 + station no. x 10 + 6 | CT alarm |
| 500 + station no. x 10 + 7 | CT DB |
| 500 + station no. x 10 + 8 | CT DB Set |
| 500 + station no. x 10 + 9 | standard zero point |
| <Table 2> Data saving address and contents when Local mode | |
You can set OSC controller by using 'write settings'.
Digital Write
Digital write setting parameters are as follows:
1) PORT Port no. (0 ~ 255)
2) STATION 0 ~ 32 controller station number.
3) ADDRESS don't care.
4) Extra1 write command.
RUN – modifying : 0 = Stop, 1 = Run,
ANG – rotation angle,
VEL – rotation velocity,
DIR – standard direction,
SYAL – SYNC alarm,
SYDB – SYNC DB,
CTAL – CT alarm,
CTDB – CT DB,
CTAL – CT alarm Set,
ZERO – standard zero point.
5) Extra2 don't care.
Write example 1)
PORT:0, station:1, ADDRESS:0000, Extra1:RUN, Extra2 : 0
The setting parameter shown above is modifying control( On = run / Off = stop ) example of station 1 OSC controller.
Analog Write
Analog write setting parameters are as follows:
1) PORT Port no. (0 ~ 255)
2) STATION 0 ~ 32 controller station number.
3) ADDRESS don't care.
4) Extra1 write command.
RUN – modifying : 0 = Stop, 1 = Run,
ANG – rotation angle,
VEL – rotation velocity,
DIR – standard direction,
SYAL – SYNC alarm,
SYDB – SYNC DB,
CTAL – CT alarm,
CTDB – CT DB,
CTAL – CT alarm Set,
ZERO – standard zero point.
5) Extra2 don't care.
Write example 1)
PORT:0, station:1, ADDRESS:0000, Extra1:ANG, Extra2 : 0
The setting parameter shown above is rotation angle setting example of station 1 OSC controller.
Write example 2)
PORT:0, station:1, ADDRESS:0000, Extra1:VEL, Extra2 : 0
The setting parameter shown above is rotation velocity setting example of station 1 OSC controller.
Write example 3)
PORT:0, station:1, ADDRESS:0000, Extra1:ZERO, Extra2 : 0
The setting parameter shown above is standard zero point setting example of station 1 OSC controller.
Note) Please refer to manual of oscillator controller for more information about writing parameters.