KBT KB-750 Series communication driver is the driver to communicate with controller of KBT Co,. Ltd. in Korea.
KB-750 controller is compatible with MK-750(LA-750) series.
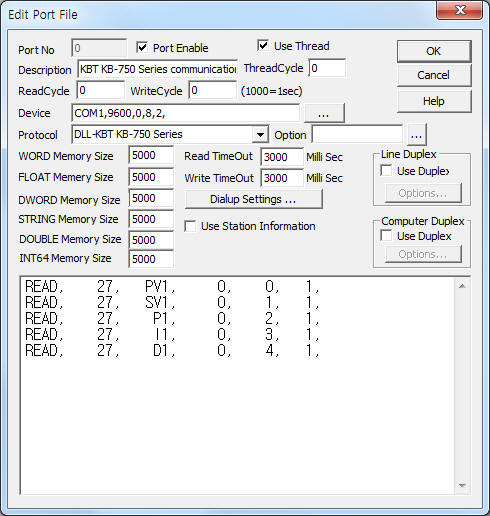
<Figure 1> is read setting example of KBT KB-750 Series communication driver.
|
|
| <Figure 1> Read setting example of KBT KB-750 Series communication driver |
Device part of <Figure 1> input Com Port(COM1), Baud Rate(9600), Parity Bit(0), Data Bit(8), Stop Bit(2) respectively, according to controller.
Station address(0 ~ 99), baud rate(1200 ~ 19200), parity bit(0, 1, 2), data bit(7, 8), stop bit(1, 2) are can set by using operation button of front panel.
In protocol option part, you can set the following: weather to use of BCC check(0 : don't use, 1 : use, default = 1), display method of abnormal PV value when 'LLLL' ( 0 : 0, 1 : -1, default = 0 ). Each argument is a comma-delimited.
KBT KB-750 Series communication driver read schedule
Read schedule setting parameters are as follows:
1) Station – 0 ~ 99 controller station number.
2) Read command – Command = PV1,SV1,PR1~PR9,INP,PVG,PVS,PDF,DP,FU,LOC,SLH,SLL,MD,CNT,DIR,MV1,TUN, ATG,ATC,P1,I1,D1,T1,ARW,MH1,ML1,C1,CP1,MV2,P2,T2,MH2,ML2,PBB,C2,CP2,DB, E1F,E1H,E1L,E1C,E1T,E1B,E1B,E1P,CM1,CT1,E2F,E2H,E2L,E2C,E2T,E2B,E2P,CM2, CT2,DIF,DIP,SV2,COM,BPS,ADR,AWT,MOD,TMO,TMF,H/M,TSV,TIM,TIA,OM1,AT.
3) Read start address – Don't care.
4) Save start address for Communication Server – Saving start address of Communication Server.
5) Read Size – Fixed to 1.
Read schedule example)
READ, 27, PV1, 0, 0, 1,
READ, 27, SV1, 0, 1, 1,
READ, 27, P1, 0, 2, 1,
READ, 27, I1, 0, 3, 1,
READ, 27, D1, 0, 4, 1,
<Table 1> is data saving address and contents for each read, write command.
| Read/Write command | Contents | Data saving address | Remarks |
| PV1 | read of current value(read only) | Start addr + 0 : current(present) value | real value = 1/1, 1/10, 1/100, 1/1000 according to decimal point(DP command) |
| SV1 | read, write of setting value | Start addr + 0 : setting value | |
| PR1~PR9 | priority sereen function 1 ~ 9 | Start addr + 0 : priority sereen value STRING memory = save readed string data |
0 = OFF, 3 = INP, 4 = PVG, 5 = PVS, 6 = PDF |
| INP | setting of input type | Start addr + 0 : setting value of input type | |
| PVG | gain value of PV correction | Start addr + 0 : gain value of PV correction | |
| PVS | zero value of PV correction | Start addr + 0 : zero value of PV correction | |
| input filter value | Start addr + 0 : input filter value | ||
| DP | decimal point | Start addr + 0 : decimal point value | 0 = don't use decimal point, 1 ~ 3 = 1 ~ 3 digit decimal point |
| FU | read, write of fan cushion key value | Start addr + 0 : fan cushion key value | |
| LOC | read, write of key lock value | Start addr + 0 : key lock value | 0 ~ 3 |
| SLH | read, write of SV high limit | Start addr + 0 : SV high limit value | |
| SLL | read, write of SV low limit | Start addr + 0 : SV low limit value | |
| MD | read, write of control mode | Start addr + 0 : control mode value | 0 = control execution, 1 = manual, 2 = control stop, 3 = auto tuning |
| CNT | read, write of control type setting | Start addr + 0 : control type setting value | |
| DIR | read, write of forward/reverse operation | Start addr + 0 : forward/reverse operation value | |
| MV1 | read, write of output 1 MV value | Start addr + 0 : output 1 MV value | |
| TUN | read, write of tuning type setting value | Start addr + 0 : tuning type setting value | |
| ATG | read, write of AT constant value | Start addr + 0 : AT constant value | |
| ATC | read, write of AT sensitivity | Start addr + 0 : AT sensitivity value | |
| P1 | read, write of output 1 proportion | Start addr + 0 : output 1 proportion value | |
| I1 | read, write of output 1 integral time | Start addr + 0 : output 1 integral time | |
| D1 | read, write of output 1 differential time | Start addr + 0 : output 1 differential time | |
| T1 | read, write of output 1 proportion cycle | Start addr + 0 : output 1 proportion cycle | |
| ARW | read, write of anti reset Wind-Up | Start addr + 0 : anti reset Wind-Up value | |
| MH1 | read, write of MV 1 high limit | Start addr + 0 : MV 1 high limit value | |
| ML1 | read, write of MV 1 low limit | Start addr + 0 : MV 1 low limit value | |
| C1 | read, write of output 1 control sensitivity | Start addr + 0 : output 1 control sensitivity | |
| CP1 | read, write of output 1 OFF point position | Start addr + 0 : output 1 OFF point position | |
| MV2 | read, write of output 2 MV value | Start addr + 0 : output 2 MV value | |
| P2 | read, write of output 2 proportion | Start addr + 0 : output 2 proportion value | |
| T2 | read, write of output 2 proportion cycle | Start addr + 0 : output 2 proportion cycle | |
| MH2 | read, write of MV 2 high limit | Start addr + 0 : MV 2 high limit value | |
| ML2 | read, write of MV 2 low limit | Start addr + 0 : MV 2 low limit value | |
| PBB | read, write of manual reset | Start addr + 0 : manual reset value | |
| C2 | read, write of output 2 control sensitivity | Start addr + 0 : output 2 control sensitivity | |
| CP2 | read, write of output 2 OFF point position | Start addr + 0 : output 2 OFF point position | |
| DB | read, write of dead band | Start addr + 0 : dead band value | |
| E1F | PV event output 1 function setting | Start addr + 0 : PV event output 1 function setting | |
| E1H | read, write of event output 1 high limit | Start addr + 0 : event output 1 high limit | |
| E1L | read, write of event output 1 low limit | Start addr + 0 : event output 1 low limit | |
| E1C | read, write of event output 1 sensitivity | Start addr + 0 : event output 1 sensitivity | |
| E1T | read, write of event output 1 delay timer | Start addr + 0 : event output 1 delay timer | |
| E1B | read, write of special event output 1 function setting | Start addr + 0 : special event output 1 function setting value | |
| E1P | read, write of event output 1 polarity | Start addr + 0 : event output 1 polarity | |
| CM1 | read of CT input(read only) | Start addr + 0 : CT input value | |
| CT1 | read, write of event output 1 current abnormal | Start addr + 0 : event output 1 current abnormal | |
| E2F | read, write of special event output 2 function setting | Start addr + 0 : special event output 2 function setting value | |
| E2H | read, write of event output 2 high limit | Start addr + 0 : event output 2 high limit | |
| E2L | read, write of event output 2 low limit | Start addr + 0 : event output 2 low limit | |
| E2C | read, write of event output 2 sensitivity | Start addr + 0 : event output 2 sensitivity | |
| E2T | read, write of event output 2 delay timer | Start addr + 0 : event output 2 delay timer | |
| E2B | read, write of special event output 2 function setting | Start addr + 0 : special event output 2 function setting value | |
| E2P | read, write of event output 2 polarity | Start addr + 0 : event output 2 polarity | |
| CM2 | read of CT 2 input(read only) | Start addr + 0 : CT 2 input value | |
| DIF | read, write of DI input function | Start addr + 0 : DI input function | |
| DIP | read, write of DI polarity setting | Start addr + 0 : DI polarity setting value | |
| SV2 | read, write of setting 2 | Start addr + 0 : setting value 2 | real value = 1/1, 1/10, 1/100, 1/1000 according to decimal point(DP command) |
| COM | read, write of communication parameter | Start addr + 0 : use of BCC(0 or 1) Start addr + 1 : Parity bit Start addr + 2 : Data bit(7 or 8) Start addr + 3 : Stop bit(1 or 2) |
BCC : 0 = don't use, 1 = use Parity : 0 = None, 1 = Odd, 2 = Even |
| BPS | read, write of baud rate | Start addr + 0 : baud rate value | 12 = 1200 bps, 24 = 2400 bps 48 = 4800 bps, 96 = 9600 bps 192 = 19200 bps |
| ADR | read, write of controller station address | Start addr + 0 : controller station address | 0 ~ 99 |
| AWT | read, write of response speed | Start addr + 0 : response speed | 0 ~ 250 |
| MOD | read, write of communication mode | Start addr + 0 : communication mode | |
| TMO | read, write of timer writing pre-setting | Start addr + 0 : timer writing pre-setting value | |
| TMF | read, write of timer function | Start addr + 0 : timer function value | |
| H/M | read, write of timer unit | Start addr + 0 : yimer unit value | |
| TSV | read, write of timer SV start permission | Start addr + 0 : timer SV start permission value | |
| TIM | read, write of timer time setting | Start addr + 0 : timer time setting value | |
| TIA | read of timer remain time(read only) | Start addr + 0 : timer remain time | |
| OM1 | read of output monitoring(read only) | Start addr + 0 : output monitoring value | 0 Bit = OUT1 ON/OFF, 4 Bit = OUT2 ON/OFF, 8 Bit = EV1 ON/OFF, 12 Bit = EV2 ON/OFF |
| AT | read, write of AT run/stop | Start addr + 0 : AT run/stop value | 1 = run, 0 = stop |
| TST | write of timer run/stop(write only) | 1 = Start, 0 = Stop | |
| STR | write of data preservation(write only) | don't use output value | |
| <Table 1> Data saving address and contents for each read, write command | |||
KBT KB-750 Series communication driver store the same data in WORD, DWORD, FLOAT, STRING memory, but the data format are different.
If you click the icon ![]() in protocol option part at
<Figure 1>, you
can see the dialogue box such as <Figure 2>. you can also set read schedule by
using this part.
in protocol option part at
<Figure 1>, you
can see the dialogue box such as <Figure 2>. you can also set read schedule by
using this part.
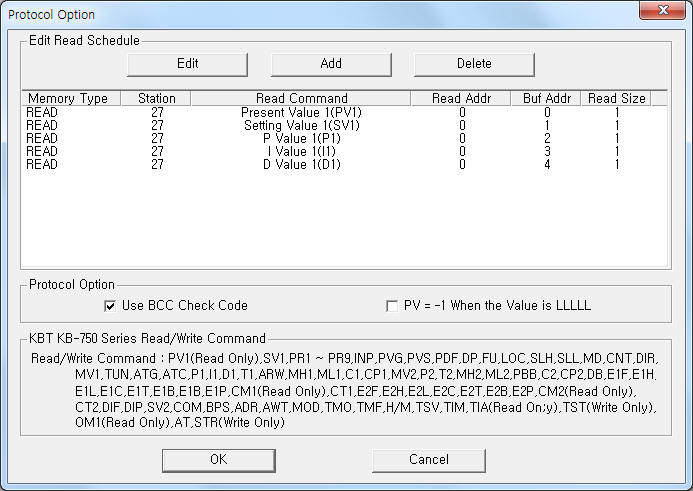 |
| <Figure 2> Example of KBT KB-750 Series communication driver’s Option dialog box |
You can set read schedule by using ![]() ,
, ![]() ,
, ![]() button and listbox of <Figure
2>.
button and listbox of <Figure
2>.
Also, you can set weather to use of BCC check, display method of abnormal PV value when 'LLLL' by using the part of 'Use BCC Check Code', 'PV = -1 When the Valeu is LLLLL' of <Figire 2>.
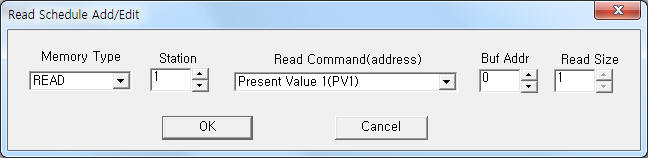 |
| <Figure 3> Example of KBT KB-750 Series communication driver’s read schedule Add/Edit dialog box |
When you click Add button or Edit button in dialogue box of <Figure 2>, dialogue box of <Figure 3> is shown.
You can set KBT KB-750 Series controller by using 'writing settings'.
Digital Write
Digital write and analog write have the same setting parameters except output value.
Analog Write
Analog write setting parameters are as follows:
1) PORT Port no. (0 ~ 255)
2) STATION 0 ~ 99 controller station number.
3) ADDRESS Don't care.
4) Extra1 Write command = SV1,PR1~PR9,INP,PVG,PVS,PDF,DP,FU,LOC,SLH,SLL,MD,CNT,DIR,MV1,TUN, ATG,ATC,P1,I1,D1,T1,ARW,MH1,ML1,C1,CP1,MV2,P2,T2,MH2,ML2,PBB,C2,CP2, DB,E1F,E1H,E1L,E1C,E1T,E1B,E1B,E1P,CT1,E2F,E2H,E2L,E2C,E2T,E2B,E2P,CT2, DIF,DIP,SV2,COM,BPS,ADR,AWT,MOD,TMO,TMF,H/M,TSV,TIM,AT,TST,STR. ( refer to <Table 1> )
PR1 ~ PR9 write command : please input 'priority sereen command name' after write command separated by dot( . ).
example) PR1.INP, PR2.LOC, …
COM write command : please input 'contents of communication parameter' after write command separated by dot( . ).
example) COM.B8N2, COM.N8E2, …
5) Extra2 Don't care.
Write example 1)
PORT:0, station:27, ADDRESS:0000, Extra1: SV1, Extra2 : 0
The setting parameter shown above is a write example for setting value to 27 KBT KB-750 Series controller.
real setting value = 1/1, 1/10, 1/100, 1/1000 according to decimal point(DP command).
Write example 2)
PORT:0, station:27, ADDRESS:0000, Extra1: P1, Extra2 : 0
The setting parameter shown above is a proportion value setting example for output 1 to 27 KBT KB-750 Series controller.
Write example 3)
PORT:0, station:27, ADDRESS:0000, Extra1: I1, Extra2 : 0
The setting parameter shown above is a integral time value setting example for output 1 to 27 KBT KB-750 Series controller.
Write example 3)
PORT:0, station:27, ADDRESS:0000, Extra1: D1, Extra2 : 0
The setting parameter shown above is a differential time value setting example for output 1 to 27 KBT KB-750 Series controller.
Connection of communication cable and main power are as follows.
Connection of RS-485 communication cable
Please connect T+, T- connector of KBT-750 and T+, T- of computer such as <Figure 4>.
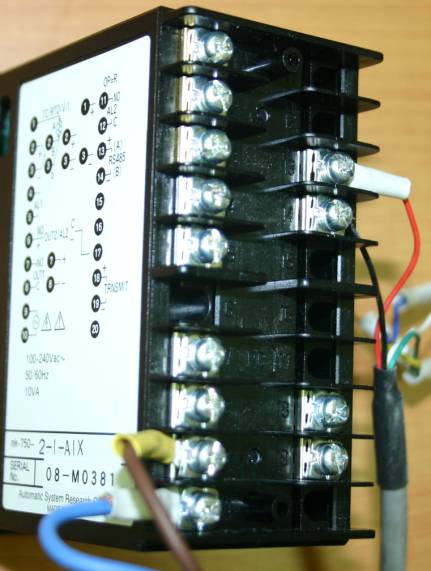 |
| <Figure 4> Connection example of communication cable and main power to KB-750 controller |
Connection of main power
Please connect 110 ~ 240V 50/60HZ AC power to main power connector such as <Figure 4>.
<Figure 5> is appearance of KB-750 controller.
 |
| <Figure 5> Appearance of KB-750 controller |