DASA Motion Controller Communication Driver is the driver to communicate with motion controller of Dasa Tech.in Korea.
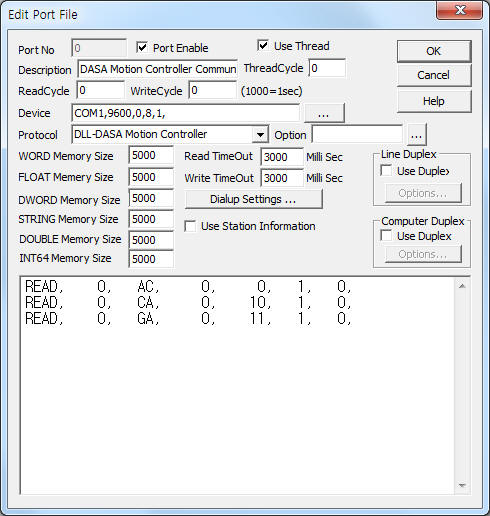
<Figure 1> is read setting example of DASA Motion Controller communication driver.
|
|
| <Figure 1> Read setting example of DASA Motion Controller communication driver |
Device part of <Figure 1> input Com Port(COM1), Baud Rate(9600), Parity Bit(0), Data Bit(8), Stop Bit(1) respectively.
DASA Motion Controller communication driver’s read schedule
Read schedule setting parameters are as follows:
1) STATION – Don't care.
2) Read Command – AA : Read of robot status,
AB : Read of error status,
AC : Position read,
CA : Velocity read,
ED : Read of operation line,
EF : Read of operation/setting file,
FC : Whether the file exists,
GA : Read of input card,
GB : Read of output card,
GD : Read of installed card number,
GE : Read of PLC input. ( Refer to <Table 1>, <Table 2> )
3) Read Start Address – Input according to read command. ( Refer to <Table 1> )
4) Save start address for Communication Server – Saving start address of Communication Server.
5) Read Size – Fixed to 1.
6) Extra1 – To be readed filename number when 'FC' read command.. ( filename : cmd_%04.txt, %04d = filename number )
Read schedule example)
READ, 0, AC, 0, 0, 1, 0,
READ, 0, CA, 0, 10, 1, 0,
READ, 0, GA, 0, 11, 1, 0,
<Table 1> is read command and contents, start address, extra1 of DASA Motion Controller communication driver.
<Table 2> is store values and contents according to read command.
Read command |
Contents |
Start address |
Extra1 |
AA |
Read of robot status |
Don,t care |
Don,t care |
AB |
Read of error status |
||
AC |
Position read |
type – 0 : Encoder, 1 : Joint, 2 : XYZ |
|
CA |
Velocity read |
Don,t care |
|
ED |
Read of operation line |
||
EF |
Read of operation/setting file |
||
FC |
Whether the file exists |
DISK ID – 0 : Backup RAM, 1 : EEPROM, 2 : FDD |
filename numbe : cmd_%04.txt, %04 =0 ~ 9999 |
GA |
Read of input card, |
0 ~ 99 (input card number) |
Don,t care |
GB |
Read of output card |
0 ~ 99 (output card number) |
|
GD |
Read of installed card number |
Don,t care |
|
GE |
Read of PLC input |
0 ~ 99 (input card number) |
|
| <Table 1> Read command and contents, start address, extra1 of DASA Motion Controller communication driver | |||
Read command |
Store Values |
Contents |
AA |
Start Add + 0 Start Add + 1 |
Data 0 - 3Bit : Error, 2 Bit : Motor Power, 1 Bit : In Position, 0 Bit : Run, Data 1 - 1 Bit : Servo, 0 Bit : Origin Complete, |
AB |
Start Add + 0 ~ n |
Error character display |
AC |
Start Add + 0 ~ n |
Encoder : 10 byte data (0 ~ 999999999), number of axis. Joint : 10 byte float data, number of axis. XYZ : X, Y, Z, A, B, C of axis, 10 byte float data and POSE data. POSE- 2 Bit : right(1)/left(0), 1 Bit : above(1)/below(0), 0 Bit : upper(1)/down(0), |
CA |
Start Add + 0 |
Velocity : 0 ~ 100 |
ED |
Start Add + 0 |
Operating line number : 0 ~ 999 or –1 |
EF |
Start Add + 0 ~ n |
Operating filename number (A : 65) |
FC |
Start Add + 0 |
1 : file exist, 0 : file does not exist |
GA |
Start Add + 0 Start Add + 1 Start Add + 2 ... |
Card number 3 ~ 0 Bit : 1 ~ 4 .... |
GB |
||
GD |
Start Add + 0 Start Add + 1 |
The number of input card (0 ~ 99) The number of output card (0 ~ 99) |
GE |
Start Add + 0 Start Add + 1 Start Add + 2 ... |
Card number 3 ~ 0 Bit : 1 ~ 4 .... |
| <Table 2> Store values and contents according to read command | ||
You can write setting value by using write settings.
Bit Write
Word write setting parameters are as follows:
1) PORT Port no. (0 ~ 255)
2) STATION Refer to <Table 3>.
3) ADDRESS Saving start address for read command.
4) Extra1 Read or write command. Refer to <Table 1>, <Table 3>.
AA : Read of robot status,
AB : Read of error status,
AC : Position read,
BA : Operation starting point,
BB : Specified motion execution, dot position of pre-selected point file,
BC : Specified motion execution of pre-selected data,
BD : Robot move from current position, move count = inputed number,
BE : Jog Move start,
BF : Jog Move Continue,
BG : Jog Move stop,
CA : Velocity read,
CB : Velocity write,
CC : Operation execution,
CD : Operation stop,
CF : Emergency stop,
CG : Error reset,
CH : Motion stop,
CI : Origin Stop,
CJ : System Reboot,
CE : Operation initialize,
DA : Moter Power ON/OFF,
DB : Servo ON/OFF,
DC : To be operated filename setting,
EA : Run Stop Set,
EB : Goto Line,
EC : Break Line setting,
ED : Read of operation line,
EE : Job Run Mode Exit,
EF : Read of operation/setting file,
EG : Break Line clear,
FC : Whether the file exists,
GA : Read of input card,
GB : Read of output card,
GC : Write to output card,
GD : Read of installed card number,
GE : Read of PLC input.
GF : Write to PLC output card.
5) Extra2 To be readed filename number when 'FC'(read), BB, BC, BD, DC command.. ( filename : cmd_%04.txt, %04d = filename number )
<Table 3> is write command and contents, station, start address, extra1, writing value of DASA Motion Controller communication driver.
| Write Command | Contents | STATION | Extra2 | Writing value |
| BA | Operation starting point | Don't care | Don't care | Don't care |
| BB | Specified motion execution, dot position of pre-selected point file | Type
– 0 : Encoder, 1 : Joint, 2 : XYZ |
Command filename number | |
| BC | Specified motion execution of pre-selected data | Data Type 0 : Joint, 1 : ZYZ |
||
| BD | Robot move from current position, move count = inputed number | |||
| BE | Jog Move start | Axis : 0 ~ (number of axis –1) | Direction – 0 : -, 1 : + | Coordinate - 0 : Joint, 1 : ZYZ, 2 : TOOL |
| BF | Jog Move Continue | Don't care | Don't care | Don't care |
| BG | Jog Move stop | |||
| CB | Velocity write | Velocity : 0 ~ 100 | ||
| CC | Operation execution | Don't care | ||
| CD | Operation stop | |||
| CF | Emergency stop | |||
| CG | Error reset | |||
| CH | Motion stop | |||
| CI | Origin Stop | |||
| CJ | System Reboot | |||
| CE | Operation initialize | |||
| DA | Motor Power ON/OFF | 1 : ON, 0 : OFF | ||
| DB | Servo ON/OFF | |||
| DC | To be operated filename setting | Command filename number | Don't care | |
| EA | Run Mode Set | Don't care | Mode – Continuous : 0, line : 1 |
|
| EB | Goto Line | Line number : 0 ~ 999 | ||
| EC | Break Line setting | |||
| EE | Job Run Mode Exit, | Don't care | ||
| EG | Break Line clear | Line number : 0 ~ 999 | ||
| FC | Whether the file exists | Command filename number | Don't care | |
| GC | Write to output card | The number of card : 0 ~ 99 | Point of contact : 0 ~ 99 | Data – HIGH : 1, LOW : 0 |
| GF | Write to PLC output card | |||
| <Table 3> Write command and contents, station, start address, extra1, writing value of DASA Motion Controller communication driver | ||||
Method of cmd_%04d.txt)
a) % 04d = the value of 'Extra2' .
example1) Extra2 = 0, filename : cmd_0000.txt
example2) Extra2 = 1, filename : cmd_0001.txt
b) Input each element separated by a comma( , ),
c) Filename input as characters and other elements input as number.
Word Write
Word write and bit write have the same setting parameters except output value.
Write example 1)
Station:0 Address:0000, Extra1:BE, Extra2:1, writing value = 2.0
The setting parameter shown above is an example of 'Jog Move start' command.
The setting element = 1 axis, + direction, TOOL Coordinate.
Write example 2)
Station:1 Address:0000, Extra1:GC, Extra2:2, writing value = 1.0
The setting parameter shown above is an example of 'Write to output card' command.
The setting element = 1 output card, 2( 3rd ) point of contact, high status output.
Write example 3)
Station:0 Address:0050, Extra1:AC, Extra2: ,
The setting parameter shown above is an example of 'Position read' command.
After write, the readed values(Encoder Position) are saved from 50 WORD memory.